ZEPマガジン
|
2025年11月27日号
[AI/IoT/マイコン][ロボット/自動運転/宇宙]
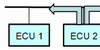
実車実験!車載CANへのなりすまし攻撃 車載CANのプロトコル解析 送信エラーの累積によってノードが自己隔離する「バスオフ」は,故障耐性を目的とした規定動作.復帰には一定の条件や手続きが必要 |

|
2025年11月26日号
[信号処理/セキュリティ][AI/IoT/マイコン]
600GOPS!STM32N6マイコンによるエッジAIカメラの開発 Cortex-M55で動かすセキュア・ファームウェア Cortex-M55上で動かすファームウェアは,セキュア・ブートとハードウェア・アクセラレータによる暗号化機能を組み合わせて作る |
|
2025年11月25日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
1度は必ず見舞われる定番トラブル「発振」と対策 実験キットで学ぶ初歩電子回路設計 発振は位相補償を適切に施すことで安全に制御できる.回路の寄生素子や信号遅延を理解し,小容量のキャパシタを追加することで対策できる |
|
2025年11月24日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
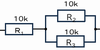
脱教科書!設計者が使う定数E24系列 実験キットで学ぶ初歩電子回路設計 E24系列は,基本的な抵抗値を24段階に分けて定義したもので,1.0,1.1,1.2から9.1までの数字が2桁の基本値として設定されている |

|
2025年11月23日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
非反転バッファや単電源アンプにレール・ツー・レールOPアンプ 実験キットで学ぶ初歩電子回路設計 レール・ツー・レールOPアンプは,入力端子や出力端子が電源電圧に非常に近い範囲で動作可能な信号増幅用アナログIC |

|
2025年11月22日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
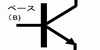
バイポーラとFETどうやって使いわける? 実験キットで学ぶ初歩電子回路設計 バイポーラ・トランジスタは,ベースに流す電流に応じてコレクタ電流が増幅される.FETはゲートに加える電圧でドレイン-ソース間を制御する |
|
2025年11月21日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
トランジスタを動かす電流増幅の実験 実験キットで学ぶ初歩電子回路設計 トランジスタの動作によって,ベース電流に応じてコレクタ電流が増幅される.この特性を利用することで,スイッチやアンプを実現できる |

|
2025年11月20日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
USB半導体チェッカを動かす実習の準備 実験キットで学ぶ初歩電子回路設計 キット付きVOD教材「実験キットで学ぶ初歩の電子回路設計」に付属するUSB半導体チェッカを使う前に,電源供給や接続環境を確認する |
|
2025年11月19日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
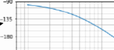
制御プログラムの良否:判定時間応答と周波数応答 M5 StampFlyで実習マルチコプタ制御プログラミング P制御やPID制御を用いることで,立ち上がり特性やオーバーシュートを調整できる.パラメータ調整により,時間応答の速度と安定性をバランスさせることが可能 |
|
2025年11月18日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
姿勢を定量化する2つの物理量:加速度と角速度 M5 StampFlyで実習マルチコプタ制御プログラミング M5 StampFlyで実習する場合,姿勢は加速度と角速度という2つの物理量で定量化できる |
|
2025年11月17日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
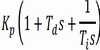
姿勢制御プログラム実装の準備:PIDの制御量を式で表す M5 StampFlyで実習マルチコプタ制御プログラミング PID制御プログラムでは,比例,積分,微分の各要素を組み合わせて最終的な制御入力Uを生成し,各モータや制御軸ごとに独立して計算する |
|
2025年11月16日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
目標姿勢からのずれを3種の制御量"PID"で自動補正 M5 StampFlyで実習マルチコプタ制御プログラミング マルチコプタの姿勢を安定させるには,目標姿勢からのずれを瞬時に補正する制御が不可欠であり,その基本は比例制御(P),積分制御(I),微分制御(D)である |

|
2025年11月15日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
ねらった姿勢にピタリ!フィードバック制御の導入 M5 StampFlyで実習マルチコプタ制御プログラミング フィードバック制御を導入することで,ドローンの操縦者が行う操作量は少なくても安定した姿勢を維持できるようになる |

|
2025年11月14日号
[ロボット/自動運転/宇宙][制御/モデルベース設計][モータ/アクチュエータ]
上下/ロール/ピッチ/ヨー:機体の運動を自在制御 4つのプロペラの回転と運動の関係を整理 4枚のプロペラをもつクアッド・コプタは,推力の合成とトルクの制御によって機体の姿勢と位置を制御する |

|
2025年11月13日号
[モータ/アクチュエータ][制御/モデルベース設計]
コーディングと可視化:ブラウザIDE Jupiter LAb ラズパイ×Pythonモータ制御プログラミング入門 ラズベリー・パイにはPythonとJupyter Labがあらかじめ導入されている.Jupyter Labはブラウザ上で動作する統合開発環境で,コードの編集・実行・結果の可視化を同一画面で行える |
|
2025年11月12日号
[モータ/アクチュエータ][制御/モデルベース設計]
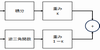
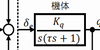
制御器設計の第1歩!モータの数式化から始める ラズパイ×Pythonモータ制御プログラミング入門 電気的および機械的なエネルギ変換を行う直流モータの動作は,2階の微分方程式で表すことができる |
|
2025年11月11日号
[モータ/アクチュエータ][制御/モデルベース設計]
制御工学計算ライブラリPython Controlのススメ ラズパイ×Pythonモータ制御プログラミング入門 Python-Controlは制御工学の計算やシミュレーションをPython上で実行できるライブラリ.時間応答の可視化,ステップ応答や周波数応答の計算,安定余裕の評価などが行える |

|
2025年11月10日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
実際の電子製品のプリント基板 KiCADで始めるプリント基板設計入門 プリント基板(Printed Circuit Board : PCB)は,電子回路を構成する配線パターンが形成された板 |

|
2025年11月9日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
IC梱包には乾燥剤:リフロ過熱時の水分膨張防止 KiCADで始めるプリント基板設計入門 表面実装ICはリールやトレイ,銀色のシールド・バッグなどに梱包される.パッケージ内には乾燥剤が同梱され,内部の水分を吸収する |

|
2025年11月8日号
[アナログ/センサ/計測][半導体/電子部品][AI/IoT/マイコン]
端子のはんだ付け用金属面「パッド」データの作成 KiCADで始めるプリント基板設計入門 部品の端子をはんだ付けするための金属面「パッド」のフット・プリントは,部品カタログに記載された寸法を基準に作成する |