
|
|---|
姿勢を定量化する2つの物理量加速度と角速度
M5 StampFlyで実習マルチコプタ制御プログラミング
加速度計とジャイロの基本原理
|
|---|
|
図1 M5 StampFlyで実習する場合,姿勢は加速度と角速度という2つの物理量で定量化できる.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤恒平 詳細:[VOD/KIT/data]ドローン・キット``drone Fly''で学ぶマルチコプタ制御入門 |
M5 StampFlyで実習する場合,姿勢は加速度と角速度という2つの物理量で定量化できます.加速度計は3軸の加速度を測定でき,物体の速度変化を捉えます. 重力の方向も測定でき,物体の傾きの推定に役立ちます.
加速度計の基本原理
加速度計は重りが棒の上に配置され,加速度が加わると棒が曲がるしくみです.曲がり具合を検知することで加速度の大きさや向きがわかります.静止状態では,重力加速度の方向を測定でき,Z軸方向下では重力加速度がマイナスで出力されます.プログラム時にはこの正負方向の扱いを確認しながら使用します.
ジャイロの基本原理
ジャイロは3軸周りの回転速度を測定します.回転速度を積分することで角度を算出でき,物体の傾きを推定可能です.ただし,積分にはオフセットが含まれるため,誤差が累積します.
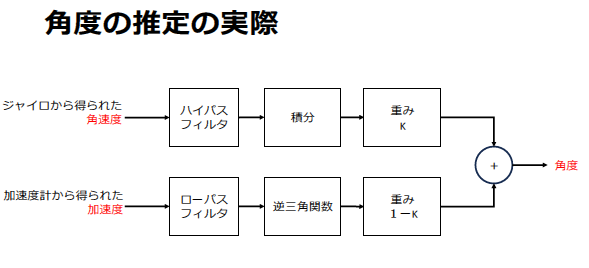
加速度計とジャイロの融合
加速度計はノイズが大きく,ジャイロは積分誤差があるため,両方の情報を融合することで精度を向上させます.使用されるアルゴリズムには以下があります.
- カルマン・フィルタ:加速度と角速度のデータを統合して推定値を補正
- マドウィック・フィルタ:軽量でリアルタイム制御向け
- 双方向フィルタ:過去と現在の情報を利用して誤差を抑制
振動ジャイロのしくみ
発電型振動ジャイロでは,振動する棒に回転運動が加わると横方向の力が発生します.この力は棒の曲げ状態に比例し,曲げ状態を測定することで角速度が算出されます.
実習での使用ポイント
今回の実習では各速度の制御が中心のため,ジャイロだけで十分です.スタンプライのスケルトン・プログラムには角度推定プログラムも含まれており,興味があれば参照できます.マドウィック・フィルタを使用することで,軽量でリアルタイムな角度推定が可能です.
〈著:ZEPマガジン〉