






















































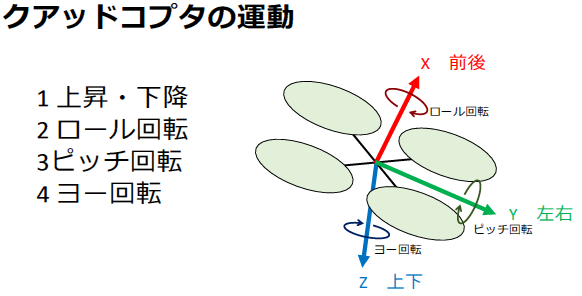
4つのプロペラと上下/ロール/ピッチ/ヨー運動
ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門
|
|---|
| クアッド・コプタは上下運動とロール,ピッチ,ヨーの回転運動を制御でき,前後や左右の移動はこれらの運動の組み合わせによって実現される 〈著:伊藤 恒平〉 |
| 【出典】:[VOD/KIT/data]M5Stamp Flyで学ぶ ドローン制御プログラミング入門 |
| 画像クリックで動画を見る.または記事を読む |
クアッド・コプタの基本運動と軸の定義
マルチコプタ,特に4つのプロペラをもつクアッド・コプタは,主に4つの運動を制御して飛行します.これらは上下運動と3軸周りの回転運動であり,前後や左右の移動は直接制御できません.機体の前方を向けたとき,前後方向がX軸,左右方向がY軸,上下方向がZ軸として定義されます.
それぞれの軸周りの回転は以下のように呼ばれます.X軸周りの回転がロール回転,Y軸周りの回転がピッチ回転,Z軸周りの回転がヨー回転です.回転の正負は軸の向きと回転方向で決まり,例えばロール回転は後方から見て時計回りが正の回転とされています.ピッチ回転は機体の前方が上がる向きが正で,ヨー回転は上から見て時計回りが正の回転です.
4つのプロペラによる運動制御のしくみ
上下運動は4つのプロペラを同時に,同じだけ強くしたり弱くしたりすることで実現します.全プロペラの推力が増加すると機体は上昇し,逆に推力が減ると下降します.プロペラの回転速度を均一に調整することが重要です.
ロール回転は左右のプロペラの回転速度差で制御します.具体的には左側のプロペラを速く回し,右側のプロペラを遅く回すと機体は右に傾くロール回転を起こします.逆に右側を速く,左側を遅く回すと左へのロール回転になります.これにより機体の横方向の傾きが調整されます.
ピッチ回転は前後のプロペラの回転速度差で制御します.前方のプロペラを遅くし,後方のプロペラを速く回すと機体の前側が上がり,前方に傾くピッチ回転が発生します.逆の操作で前方が下がる動きになります.ピッチ回転は前後方向の傾き調整に使われます.
ヨー回転は反時計回りに回るプロペラの回転速度を速くし,時計回りに回るプロペラの回転速度を遅くすることで制御します.こうすると機体は垂直軸周りに時計回りに回転します.逆の操作で反時計回りのヨー回転を起こせます.ヨー回転は機体の向きを変えるために必要です.
前後・左右の移動は回転運動の組み合わせ
クアッド・コプタは前後や左右への移動を直接制御できません.これらの移動はロール回転やピッチ回転といった回転運動を組み合わせることで実現します.例えば前方に進むにはピッチ回転で機体の前側を下げ,推力の一部を前方への推進力に変換します.横方向の移動も同様にロール回転で機体を傾けて実現します.
このように4つのプロペラの回転速度を適切に制御することで,上下運動や3軸の回転運動を組み合わせ,複雑な飛行制御が可能になります.理解すべきは直接操作できるのは上下運動とロール・ピッチ・ヨーの回転運動の4つだけである点です.これがマルチコプタ制御の基本原理です.
- 上下運動:4つのプロペラの回転速度を均一に調整する
- ロール回転:左右のプロペラの回転速度差で横方向の傾きを制御する
- ピッチ回転:前後のプロペラの回転速度差で前後方向の傾きを制御する
- ヨー回転:反時計回りと時計回りのプロペラの回転速度差で機体の向きを回転させる
参考文献
- [VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ 高精度リアルタイムSLAM&センサ・フュージョン,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.