ロボット/自動運転/宇宙
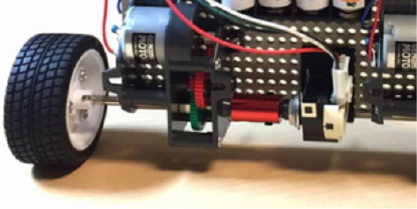
センチメートル精度のGPS測位“RTK”,LiDAR/カメラ/レーダ/IMUセンサによる自己位置推定とマッピングを組み合わせたSLAM,確率統計処理によって真値を高速推定するカルマン・フィルタなど,無人搬送機開発の技術を解説します.
ZEPマガジン























VOD教材[視聴無制限]




キット&モジュール
|
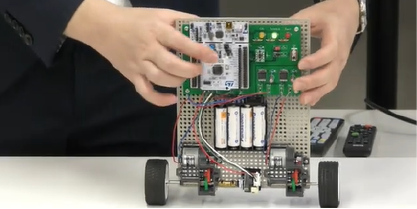
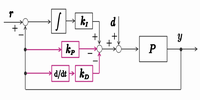
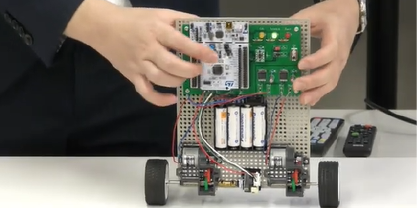
確率・統計ロボティクス学習キット MZIP-01
統計処理で姿勢の真値を推定するカルマン・フィルタ搭載の高安定倒立振子 |
|
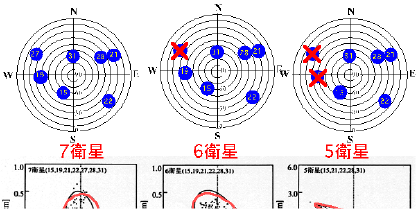
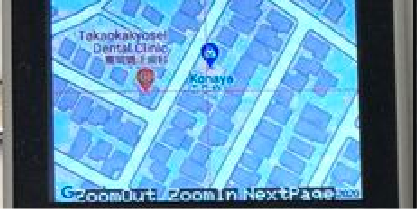
RTKポータブル・センチメートル測位キット(アンテナ付き)
MZ-M5F9PAll 無人搬送ロボット,車いす,盲人誘導,ドローン,3次元計測に |