





























































Access:12,449
ZEPマガジン
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
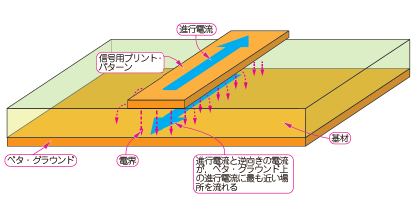
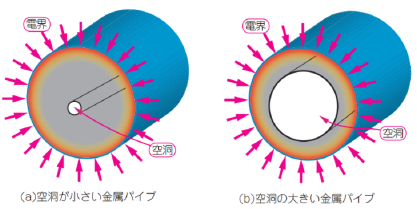
5G時代の先進ミリ波ディジタル無線実験室[Vol.3 電磁波の漏れが少ない伝送線路] 伝送線路を高周波電流の流れ方は直流電流とどのように違うのか?そして,高周波電流が流れる伝送線路からどのような電磁界が周辺に放射されるのか? |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
5G時代の先進ミリ波ディジタル無線実験室[Vol.4 信号が減衰しない基板] インピーダンス・マッチング処理がなされていない伝送線路では,信号のエネルギが負荷端で吸収されずに反射して送信端に戻る |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
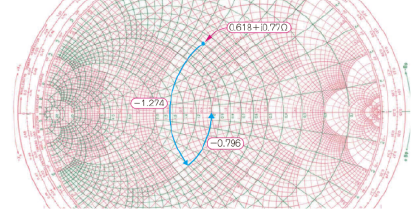
5G時代の先進ミリ波ディジタル無線実験室[Vol.5 高周波センスを磨く!スミス・チャート] 無線機や計測器の設計現場では,使う周波数や必要な帯域をまず決めて,その範囲で回路や伝送線路が希望のインピーダンスに近くなるように調整する「インピーダンス・マッチング」を行う |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
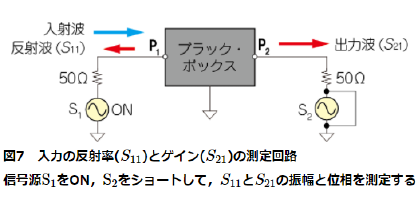
5G時代の先進ミリ波ディジタル無線実験室[Vol.6 部品や伝送線路の入出力特性モデル「$S$パラメータ」] 高周波では,回路や部品の特性を4つの変数「$S$パラメータ」を使ってモデリングするのが定石.その理由は? |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
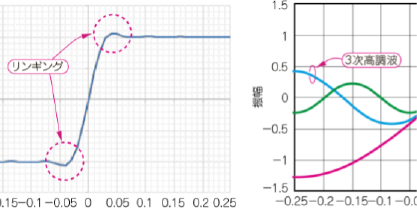
5G時代の先進ミリ波ディジタル無線実験室[Vol.7 高速データ伝送 成功の鍵「群遅延」] 群遅延特性を悪化させる主要因はLPFの位相変化である.逆に,群遅延の総合特性が実用的な帯域を決める |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
5G時代の先進ミリ波ディジタル無線実験室[Vol.8 初めての28GHzミリ波伝搬実験] 次世代通信5Gには,400MHzもの超広帯域ベースバンド信号を送受信できる自営用の周波数バンド「ローカル5G」が割り当てられている |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
5G時代の先進ミリ波ディジタル無線実験室[Vol.9 帯域優先?精度優先?2種類の周波数変換方式] ZeroIF周波数変換は,送信信号(ベースバンド信号)とローカル信号と掛け合わせて一気に周波数アップ/ダウンする方式 |
 |
2025年12月31日号 [無線/通信/高周波]
[シミュレータ/ツール]
Pythonで一緒に!ロボット制御のモデルベース設計 設計モデルが制御対象そのものならフィードバック制御系は期待どおりに応答するが,両者にギャップがある場合は,期待どおりの応答が得られない可能性がある |
| 2025年12月31日号 [AI/IoT/マイコン]
ラズベリー・パイPicoマイコン スタートアップ・マニュアル Pythonのプログラミング開発環境“Thonny”のインストールから,マイコンへのMicroPython実装,そしてLEDを光らせるまで |
|
 |
2025年12月31日号 [半導体/電子部品]
[シミュレータ/ツール]
$V-I$特性を忠実に再現!SPICEモデル生成ツール Diode SPICE Model Creator 実ダイオードの静特性を忠実に再現!結果オーライのモデル生成ツールを自作した |
 |
2025年12月31日号 [AI/IoT/マイコン]
[信号処理/セキュリティ]
実験しながら学ぶフーリエ解析とディジタル信号処理[Vol.2 STM32マイコンの開発環境を準備する] “STM32CubeIDE”は,STM32マイコンのプログラム開発用の環境.ソース・コードの編集,クロックや内部モジュールの設定,コンパイル,デバッグが可能 |
 |
2025年12月31日号 [AI/IoT/マイコン]
シリアル通信のデバッグに便利な“Tera Term”のインストール方法 “Tera Term”(テラターム)は,シリアル通信およびTCP/IP通信向けの端末エミュレータ.マイコンから受信したシリアル・データの表示やマイコンに対してシリアル・データ送信に利用できる |
 |
2025年12月31日号 [FPGA/HDL/論理回路]
[シミュレータ/ツール]
Lチカ入門!ソフトウェア屋のためのHDL事はじめ HDLは文字どおり,ハードウェアを記述するためのものだが,ANDやフリップフロップなどの論理素子を使った回路図をそのまま一対一対応で表現できる言語ではない |
 |
2025年12月31日号 [測定器/分析装置]
[無線/通信/高周波]
スペクトラム・アナライザの読み方・測り方・使い方 スペクトラム・アナライザは,いくつかの周波数が混じった信号を周波数に分解し,分解された周波数成分の強度を表示する測定器だ |
 |
2025年12月31日号 [Python/Linux/OS]
[信号処理/セキュリティ]
USBカメラのキャプチャ&描画プログラム “OpenCV”というライブラリを利用すると,数十行のPythonまたは C++コードで本格的な画像処理を実現できる |
 |
2025年12月31日号 [FPGA/HDL/論理回路]
[無線/通信/高周波]
[信号処理/セキュリティ]
Zynq搭載ボードの決定版“Eclypse Z7”で始める高速信号処理システム開発[Vol.3. PLによるディジタル・フィルタのサンプル・プロジェクトによる実験] Xilinx(ザイリンクス)社のデバイスである“Zynq”(ジンク)を活用したディジタル信号処理システムの構築方法を基礎知識から解説 |
 |
2025年12月29日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
微分方程式→伝達関数→状態方程式:動的システムのモデリング 微分方程式のままでは,時間領域での変化を追う必要があり,応答の特徴を直感的に比較しにくいため,別の表現へ変換する手順が使われる |
 |
2025年12月28日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
過去入力から出力が決まる動的システムを制御する 現在の出力が,現在の入力だけでなく,過去の入力や状態の履歴に依存するシステム.この性質があるため,動的システムは「記憶」をもつシステムとして整理される |
 |
2025年12月27日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
最適設計も安定余裕も可制御性も,モデリング&シミュレーション設計 制御設計では,対象の動きや応答を把握しないまま調整を進めると,結果が設計者の経験に依存するが,モデリングを行えば対象の性質を共通の枠組みで議論できる |
 |
2025年12月26日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
脱試行錯誤!フィードバック制御の最適化は体系的アプローチで フィードバック制御では,ゲイン$K$を大きくすると応答は速くなるが,振動や行き過ぎが現れる.速さと振動は同時によくならない関係にある |
 |
2025年12月25日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
フィードバック制御のメリット:目標値追従/外乱抑制/安定化 フィードバック制御では,観測できる量が制御性能を左右する.回転角度を直接使う場合もあれば,角速度の情報を併用する場合もある |
 |
2025年12月24日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
角速度はシンプル制御:角度はフィードバック制御 角速度がずれると,「角度」のずれは時間とともに増えるため,角度の制御では,現在の角度がどこにあるかを見て,入力を変え続ける必要がある |
 |
2025年12月23日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
温度/回転から電力まで:「制御」の定義と応用 制御では,対象,状態,目標,操作が明確に区別される.対象はロボットや装置.状態は姿勢,速度,温度など.目標は望ましい値.操作は入力として与える物理量 |
 |
2025年12月22日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
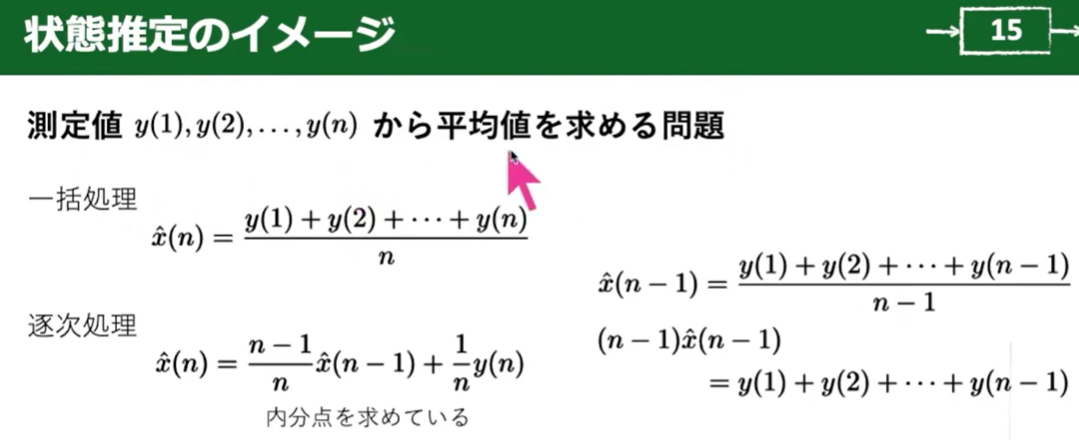
状態推定の第1歩:逐次計算による平均値計算 平均値は観測値をそのまま採用するのではなく,複数サンプルを統合して1つの値にまとめる処理.この方法がオブザーバやカルマン・フィルタにつながる |
 |
2025年12月21日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
計測点以外の量「状態」を推量るオブザーバとカルマン・フィルタ 現実のシステムでは,すべての状態をセンサで観測できるわけではない.観測できない状態を,モデルと計測から推定して扱うのが状態推定 |
 |
2025年12月19日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
[シミュレータ/ツール]
Renesas FPB+拡張モジュール+AIプログラミングで爆速マイコン・システム開発 RL78ファミリのFPBで,重力加速度の測定/表示/記録ができる「データ・ロガー」を製作.ArduinoシールドやPmod,Groveを活用する |
 |
2025年12月18日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
[シミュレータ/ツール]
バーチャル×フィジカルで高速開発!Renesas Arduino誕生 FPBはルネサス製マイコンを搭載したプロトタイピング向けボード.USB接続による電源供給と書き込み機能を備え,外部回路を用意せずに動作確認が可能 |
|
2025年12月17日号 [アナログ/センサ/計測]
[半導体/電子部品]
[シミュレータ/ツール]
V-I特性を忠実に再現!SPICEモデル生成ツール Diode SPICE Model Creator 特性パラメータを求めるSPICEモデル生成ツールは実デバイスの特性に合わせ込むことは難しいため,実測の$V-I$特性に合わせ込むことを優先したツールを自作 |
人気のZEPマガジン
ZEPマガジン総アクセス数: 766,765
- PCB CADで初めてのプリント基板製作[Vol.1 KiCadをインストールする] (80,030 views)
- PCB CADで初めてのプリント基板製作[Vol.3 回路図の入力と基板のレイアウト] (55,302 views)
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (54,883 views)
- PCB CADではじめてのプリント基板製作[Vol.2 電子部品の「シンボル」と「フットプリント」を作る] (41,782 views)
- ラズベリー・パイPicoマイコン スタートアップ・マニュアル (29,976 views)
- シリアル通信のデバッグに便利な“Tera Term”のインストール方法 (24,521 views)
- オール・トランジスタ4ビットCPUの製作とFPGA開発[Vol.1 ノイマン型CPUの設計] (20,776 views)
- Pythonではじめる 数値解析入門 (20,377 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (13,159 views)
- BluetoothワンチップBM62で作る低雑音ワイヤレス・オーディオ[Vol.1 BM62の基本的な使い方] (12,689 views)
- 自宅で設計・開発!USBミクスト・シグナル・アナライザ Analog Discovery Pro 3000 誕生 (10,334 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (8,419 views)
- 5G時代の先進ミリ波ディジタル無線実験室[Vol.3 電磁波の漏れが少ない伝送線路] (8,071 views)
- 実験しながら学ぶフーリエ解析とディジタル信号処理[Vol.1 フーリエ解析の基本「三角関数」の正しい理解] (7,899 views)
- GNU Radio×USRPで作るソフトウェア無線機 (7,746 views)
- GNU Radioで遊ぶ超高速ディジタル無線スタータキット“USRP B205mini-i” (6,894 views)
- Zynq搭載ボードの決定版“Eclypse Z7”で始める高速信号処理システム開発[Vol.1 開発環境“Vivado”をインストールしてFPGA(PL)でLチカ] (6,666 views)
- 実験しながら学ぶフーリエ解析とディジタル信号処理[Vol.2 STM32マイコンの開発環境を準備する] (6,549 views)
- スペアナ入門 RBWとVBW (5,762 views)
- 5G時代の先進ミリ波ディジタル無線実験室[Vol.2 反射の起こらない線路を作る] (5,382 views)