





























































Access:12,495
ZEPマガジン
 |
2024年10月23日号 [AI/IoT/マイコン]
[無線/通信/高周波]
[信号処理/セキュリティ]
ソフトウェア無線と通信の同期 ノイズの影響を受けやすい無線通信において,正確にデータを受信するためには,フレームの冒頭に配置される“SyncWord”にどのような符号を使うかが重要 |
 |
2024年10月22日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
$50ドローン・キット“M5Stamp Fly”の制御プログラミング M5Stamp Flyは,C/C++言語でプログラミング可能な50ドルのドローン・キット.APIがオープンソースとして提供されており飛行制御プログラムの作成や学習が可能 |
 |
2024年10月21日号 [AI/IoT/マイコン]
今さら聞けない電子回路入門 ON/OFF型センサ検出回路の定石 人体から誘導ノイズが加わる操作スイッチのON/OFFを確実に読む回路設計は地味だが重要.数k~数十k$Omega$を追加して電位不定の配線のインピーダンスを下げるのが定石 |
 |
2024年10月20日号 [AI/IoT/マイコン]
Wi-Fiマイコンで作るIoTエッジ OpenAI APIの活用 Wi-Fiマイコンを使って,センサから取得したデータやクイズをクラウドに送信し,サーバからのレスポンスを受け取ってOLEDに表示するIoTエッジを製作 |
 |
2024年10月19日号 [AI/IoT/マイコン]
長時間動作&低消費IoT開発のためのWiFiマイコン活用 小型軽量化が求められるIoTエッジは小容量電池で動き続ける必要がある.マイコンの消費電力を極小化するためにタイマによる割り込み処理は必要条件だ |
 |
2024年10月18日号 [AI/IoT/マイコン]
[無線/通信/高周波]
[信号処理/セキュリティ]
Cortex-M4/M7×500MHz!初めてのタッチパネルLCD搭載マイコン・キット STM32H7DISCO タッチパネルLCDで操作するアプリケーション開発をテーマに,STM32マイコンの知識がない状態からSTM32H747I-DISCOで新しくプロジェクトを作るまでの方法を紹介する |
 |
2024年10月18日号 [無線/通信/高周波]
[信号処理/セキュリティ]
高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 SDRの通信性能のかぎを握る群遅延一定の帯域制限フィルタ“Root Raised Cosine Filter”.このフィルタの良し悪しが感度や通信速度に大きく影響する |
 |
2024年10月17日号 [AI/IoT/マイコン]
AIカメラ M5StickVの撮影処理Pythonソース ビギナ向けAIカメラ開発キット M5StickVを使って画像認識カメラを製作.IoT化が求められる農業やセキュリティ分野に応用できる |
 |
2024年10月15日号 [基板/実装/3Dプリンタ]
写真で丸わかり!プロのはんだ付け&リワーク技術 その3 裏面に放熱用パッドのあるICはリワーク用のヒート・ガンで加熱して取り外すが,ICや基板へのダメージが大きい.軟膏状の硬目のフラックスを塗布してから加熱するのがコツ |
 |
2024年10月14日号 [AI/IoT/マイコン]
[半導体/電子部品]
今さら聞けない電子回路入門 DCモータが回るメカニズム DigiKeyチャンネル「高校生から始めるArduinoマイコンプログラミング実験室 第3回」公開.DCモータの回転メカニズム,駆動回路,回転速度と方向制御,マイコン・プログラミングを復習 |
 |
2024年10月13日号 [基板/実装/3Dプリンタ]
写真で丸わかり!プロのはんだ付け&リワーク技術 その2 私の愛用工具を紹介.温度調整機能付きはんだごて:PX-335/PX-338,鉛入りはんだ:鉛60%+錫40%,鉛フリーはんだ:ホーザンφ0.6品,ニッパ:MN-A05ほか |
 |
2024年10月12日号 [基板/実装/3Dプリンタ]
写真で丸わかり!プロのはんだ付け&リワーク技術 その1 はんだの接合原理は「のり」とは根本的に違う.銅の上にはんだ付けすると,錫と銅の間の微小領域に数μmの合金層(拡散層)が生まれ,ミクロな溶接状態が生まれる |
 |
2024年10月11日号 [AI/IoT/マイコン]
AIカメラ“M5StickV”で作る文字認識システム AIカメラ“M5StickV”で画像認識システムを製作.カメラで撮影した手書き文字が,ニューラル・ネットワークに入力されどのように処理されるのか,そのしくみを解説 |
 |
2024年10月10日号 [AI/IoT/マイコン]
[Python/Linux/OS]
[ロボット/自動運転/宇宙]
SLAMロボット入門 部屋の形をLiDAR計測 SLAMはLiDARやIMUを使って地図を作り,自分の位置を推定する技術.ラズベリー・パイとESP32マイコンを使って,環境変化に柔軟に適応するROS搭載SLAMロボットを自作 |
 |
2024年10月9日号 [アナログ/センサ/計測]
[測定器/分析装置]
[AI/IoT/マイコン]
LabVIEW×Arduinoで作る溶液インピーダンス計測器 計測制御ソフトウェア LabVIEWとビギナ向けマイコン・ボード Arduinoを組み合わせて,珈琲に三角波電圧を印加し,その電流応答を分析するボルタンメトリを制作 |
 |
2024年10月8日号 [AI/IoT/マイコン]
[Python/Linux/OS]
お話 量子コンピュータ入門 その3 量子ビットの状態は,球上の任意の点で表現され,振幅θと位相φで決まる.LED搭載のラズパイ・キットをPythonでプログラミングすれば,球上の量子ビットの動きを視覚化できる |
 |
2024年10月7日号 [AI/IoT/マイコン]
[Python/Linux/OS]
お話 量子コンピュータ入門 その2 古典的な1ビットが“0”または“1”で表されるのに対し,量子ビットは“0”と“1”の両方の状態を同時に保持できる点で異なる.これを「重ね合わせ」と呼ぶ |
 |
2024年10月6日号 [AI/IoT/マイコン]
[半導体/電子部品]
最新Arduinoで実習!マイコン・プログラミング入門 その1 最新Arduino UNO R4 Wi-Fiは,LEDマトリクス,DAC,Wi-Fi/Bluetoothなど多彩な機能をもつ.動画ではPWMとD-A変換の2つの方法でアナログ信号を生成するプログラミングを紹介 |
 |
2024年10月6日号 [AI/IoT/マイコン]
[Python/Linux/OS]
お話 量子コンピュータ入門 その1 命令を順次処理する現代のコンピュータ(フォン・ノイマン型)に対し,量子コンピュータはキュービットの重ね合わせと絡み合いを活用して超並列的に計算を実行する |
 |
2024年10月5日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
[Python/Linux/OS]
FreeRTOSで開発する高効率・高安定マルチタスク・マイコン・システム メモリやリソースが少ないマイコンに最適なFreeRTOS.その優先順位管理&停滞回避の鍵「プリエンプティブ・マルチタスク」とは |
 |
2024年10月4日号 [基板/実装/3Dプリンタ]
[高速データ伝送/USB]
[ノイズ/放熱対策]
放射ノイズの真犯人「コモン・モード電流」 帰路がないコモン・モード電流は空間を伝わって戻るため,大きな電磁波を発生させる.またノーマル・モード電流の10$^8$倍もの強さでノイズを引き起こす |
 |
2024年10月3日号 [測定器/分析装置]
[無線/通信/高周波]
[シミュレータ/ツール]
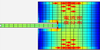
Sonnet Lite無料版をお試し!初めての電磁界シミュレータ 無線通信やRF設計用の定番ツール電磁界シミュレータ Sonnet Lite(評価版)を使って,パッチ・アンテナの電流密度分布(3.7GHz帯)を解析してみた |
 |
2024年10月2日号 [測定器/分析装置]
[無線/通信/高周波]
[シミュレータ/ツール]
自宅がRF実験室に!1万円3GHzネットアナでSパラ測定 NanoVNAは約1万円と,デスクトップ型の数百分の1で買えるポケット型ネットワーク・アナライザ.無料シミュレータも活用して,自宅でRF回路の実験や開発が可能な時代だ |
 |
2024年10月1日号 [アナログ/センサ/計測]
[半導体/電子部品]
[無線/通信/高周波]
GPS PLLシンセサイザ・キット pptgen誕生 [PR]z-pptgenは10の-10乗の高純度クロックを2チャネル生成するシンセサイザ.基準はGPSなので離れた2地点にある非同期のディジタル無線器を同期させることが可能 |
 |
2024年9月30日号 [アナログ/センサ/計測]
[半導体/電子部品]
[無線/通信/高周波]
ルビジウム時計精度!GPS PLL シンセの実験 AD9545 PLLチップにGPSレシーバ NEO-7Mが出力する1pps信号を入力し,ジッタを除去した10MHzの周波数精度をルビジウム発振器と比べてみました |
 |
2024年9月29日号 [モータ/アクチュエータ]
[AI/IoT/マイコン]
[半導体/電子部品]
高校生から始めるArduinoマイコン プログラミング実験室 DigiKeyチャネルにて「高校生から始めるArduinoマイコンプログラミング実験室」という新しい動画連載 全8回スタート!ルネサス製最新Arduinoで学ぶ |
 |
2024年9月29日号 [アナログ/センサ/計測]
[半導体/電子部品]
[無線/通信/高周波]
周波数精度 10の-10乗!GPS×PLLシンセサイザ 10の-10乗という超高精度シンセサイザはルビジウム発振器のような基準源で達成されます.近年は,GPSモジュールとAD9545などのPLLを組み合わせることで実現可能です |
 |
2024年9月28日号 [基板/実装/3Dプリンタ]
[シミュレータ/ツール]
リフロ?手はんだ?フットプリントの作成術 部品のはんだ付けの方法には自動機またははんだこての2つ選択肢があり,各々に適したフットプリントを設計することが重要.0.5mm以上のパッドの露出部分を確保したい |
人気のZEPマガジン
ZEPマガジン総アクセス数: 767,596
- PCB CADで初めてのプリント基板製作[Vol.1 KiCadをインストールする] (80,043 views)
- PCB CADで初めてのプリント基板製作[Vol.3 回路図の入力と基板のレイアウト] (55,315 views)
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (54,891 views)
- PCB CADではじめてのプリント基板製作[Vol.2 電子部品の「シンボル」と「フットプリント」を作る] (41,790 views)
- ラズベリー・パイPicoマイコン スタートアップ・マニュアル (29,983 views)
- シリアル通信のデバッグに便利な“Tera Term”のインストール方法 (24,526 views)
- オール・トランジスタ4ビットCPUの製作とFPGA開発[Vol.1 ノイマン型CPUの設計] (20,780 views)
- Pythonではじめる 数値解析入門 (20,381 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (13,162 views)
- BluetoothワンチップBM62で作る低雑音ワイヤレス・オーディオ[Vol.1 BM62の基本的な使い方] (12,693 views)
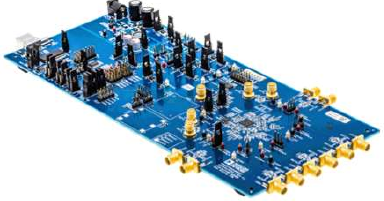
- 自宅で設計・開発!USBミクスト・シグナル・アナライザ Analog Discovery Pro 3000 誕生 (10,340 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (8,431 views)
- 5G時代の先進ミリ波ディジタル無線実験室[Vol.3 電磁波の漏れが少ない伝送線路] (8,073 views)
- 実験しながら学ぶフーリエ解析とディジタル信号処理[Vol.1 フーリエ解析の基本「三角関数」の正しい理解] (7,902 views)
- GNU Radio×USRPで作るソフトウェア無線機 (7,758 views)
- GNU Radioで遊ぶ超高速ディジタル無線スタータキット“USRP B205mini-i” (6,897 views)
- Zynq搭載ボードの決定版“Eclypse Z7”で始める高速信号処理システム開発[Vol.1 開発環境“Vivado”をインストールしてFPGA(PL)でLチカ] (6,667 views)
- 実験しながら学ぶフーリエ解析とディジタル信号処理[Vol.2 STM32マイコンの開発環境を準備する] (6,552 views)
- スペアナ入門 RBWとVBW (5,770 views)
- 5G時代の先進ミリ波ディジタル無線実験室[Vol.2 反射の起こらない線路を作る] (5,383 views)