










Access:203

GPUで最新と過去のキー・フレームを丸ごと最適化
移動経路推定アルゴリズム:GLIM
GPUによるキー・フレーム最適化の概要
 |
|---|
|
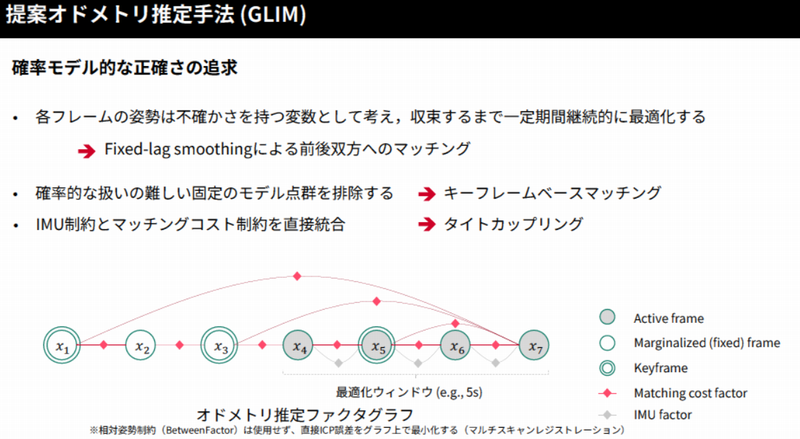
図1 GLIMアルゴリズムは,各フレームの姿勢を不確かさをもつ変数として扱い,収束するまで一定期間継続的に最適化する.画像クリックで動画を見る.または記事を読む.[講師]小出健司 詳細:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン |
GLIMアルゴリズムでは,各フレームの姿勢を不確かさをもつ変数として扱い,収束するまで一定期間継続的に最適化します.従来の手法では1フレームずつ姿勢を確定していましたが,GLIMでは過去5秒間の全フレームを同時に最適化するFixed-lag smoothingを採用しています.
マルチスキャン・レジストレーションとファクタ・グラフ
GLIMでは,過去および最新のキー・フレームを同時に考慮することで,マッチング精度を向上させます.これにより,IMU誤差やフレーム間の姿勢差をグラフ上で直接最小化するタイト・カップリングが可能です.
- 最適化対象:最新フレームと過去のキー・フレームすべて
- マッチング・コスト評価:点群間のICP(Iterative Closest Point:反復最近点法)誤差を直接最小化
- IMUファクタ:各フレームの姿勢誤差を補正
- 固定フレーム(Marginalized frame):最適化ウィンドウ外のフレーム
- Active frame:現在最適化中のフレーム
GLIMの特性と利点
GLIMのアルゴリズムは,急激な動きや点群の縮退に対してロバストです.前方しか見えないAzure Kinectや,平面環境で縮退する点群に対しても,最適化ウィンドウ内で連続的に姿勢を更新することで安定した推定を実現します.
- 急激な動きへの耐性:高速で振り回しても推定が破綻しない
- 点群縮退への耐性:短時間であれば復帰可能
- センサ・フュージョン対応:LiDAR,カメラ,IMUを統合し精度を向上
- 非同期データ対応:LiDARとカメラが前後しても正確な推定が可能
- 変則的なセンサ配置への適応:重なりが少ないフレームでもループ閉鎖可能
過去手法との比較
従来のポーズ・グラフ最適化は正確な相対姿勢を確定するために,重なりの大きな点群間だけで制約を作る必要がありました.GLIMの大域マッチング・コスト最小化では,グラフ全体で点群マッチング誤差を直接最小化できるため,少ない重なりでも安定した推定が可能です.これにより,従来手法では困難だった高速処理や変則環境下での推定が実現できます.
まとめないが理解補助として
GLIMはGPUを活用し,最新フレームと過去のキー・フレームを丸ごと最適化することで,高速かつロバストなオドメトリ推定を実現しています.Fixed-lag smoothingによる連続最適化,マルチスキャン・レジストレーション,タイト・カップリングなどの技術要素を組み合わせることで,複雑な環境でも精度の高い姿勢推定が可能です.
〈著:ZEPマガジン〉
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.