











位置・誤差・時刻の関係性を可視化&最適化
全体誤差を最小化するアルゴリズム「ファクタ・グラフ」
変数とファクタの関係
 |
|---|
|
図1 ファクタ・グラフは,ロボットや車のセンサから得られる膨大な情報と変数間の関係性をグラフで表し,全体の誤差を最小化する強力な最適化手法.画像クリックで動画を見る.または記事を読む.[講師]小出健司 詳細:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン |
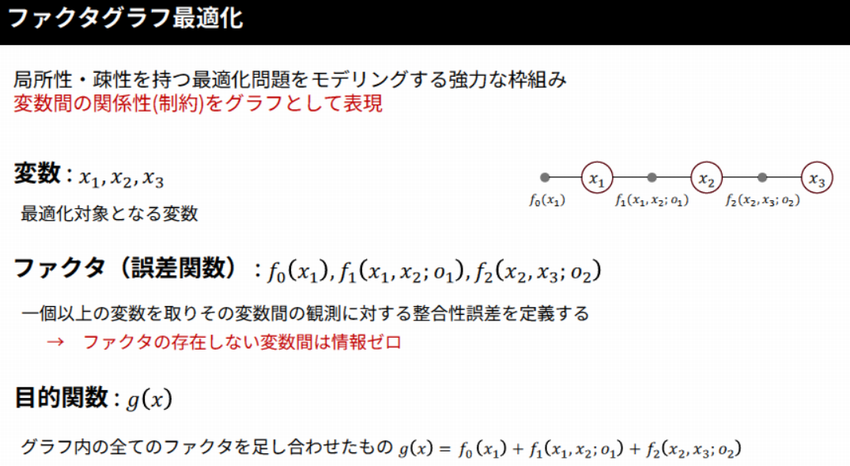
ロボットや自動運転システムでは,センサから得られる膨大な情報をもとに位置や姿勢を推定する必要があります.ファクタ・グラフ最適化(Factor Graph Optimization)は,これらの観測データと変数間の関係をグラフ構造として表現し,全体の誤差を最小化することで最適な状態を求める強力な手法です.位置,誤差,時刻などの変数がノードとして表され,それらの関係性(制約)がファクタと呼ばれる関数で結ばれます.
変数とファクタの関係
ファクタ・グラフでは,変数ノードが求めたい未知量を表します.たとえば各時刻におけるロボットの姿勢や位置などが変数です.これらの変数を$x_1$, $x_2$, $x_3$のように表し,それぞれが丸いノードとして描かれます.一方,ファクタは誤差関数を表すノードで,複数の変数間に存在する観測の整合性を定義します.ファクタが存在しない変数間には情報が存在しないため,計算を効率化できます.
目的関数はグラフ内に含まれるすべてのファクタの誤差を足し合わせたものであり,この合計誤差を最小化するように各変数を更新します.最終的には,センサ間の誤差がもっとも小さくなるような状態が得られます.
ファクタ・グラフ法の利点
- 大規模・高速な最適化が可能.疎なグラフ構造を活用することで,数千から数万の変数や制約を含む問題でも効率的に解くことができる
- 多様な応用に対応.カメラ,LiDAR,GNSS,IMU,ホイール・オドメトリなど,異なるセンサ情報を同一の枠組みで統合できる
- モジュラ設計が容易.変数や誤差関数が部品化されており,共通の変数をもつファクタを組み合わせることで,新しいセンサや制約を追加しやすい
このような特性により,ファクタ・グラフ法はSLAM(Simultaneous Localization and Mapping)や構造復元(Structure from Motion),動作計画(Motion Planning)など,多様な分野で利用されています.変数と誤差関数が明確に分離されているため,システムを構成する要素を交換したり追加したりすることが容易です.
数値計算と拡張性
ファクタ・グラフは数値的にも扱いやすい構造をもちます.グラフの疎性を活かしてヤコビ行列やハッセ行列を効率的に構築し,gauss・ニュートン法などの反復的手法で解を求めます.これにより大規模問題でも高速に収束し,リアルタイム処理が可能です.
さらに,最小2乗法に基づく誤差最小化だけでなく,ハード制約や非線形誤差を導入することで,行動計画や環境理解などの高次応用にも拡張できます.これらの特徴から,ファクタ・グラフ法は現代のロボティクスや自律システムにおける中心的な最適化枠組みの1つとされています.
〈著:ZEPマガジン〉
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.