











フレーム前後の点群位置を補正:高精度地図生成アルゴリズム
スイープ機構による点群のひずみ
スイープ機構による点群の歪み
 |
|---|
|
図1 LiDARの計測原理に起因する「点群の歪み補正」が,SLAMの位置精度の鍵を握る.画像クリックで動画を見る.または記事を読む.[講師]小出健司 詳細:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン |
Jetson Orin NanoはGPUアクセラレーションを活用し,3D LiDARのリアルタイム処理を実現できるプラットフォームです.SLAM(Simultaneous Localization and Mapping)では,環境の中で自律的に自己位置を推定しながら地図を生成する必要があります.その際,LiDARの計測原理に起因する「点群の歪み補正」が精度の鍵を握ります.ここでは,スイープ型LiDARにおける歪みの発生要因と,その補正手法について解説します.
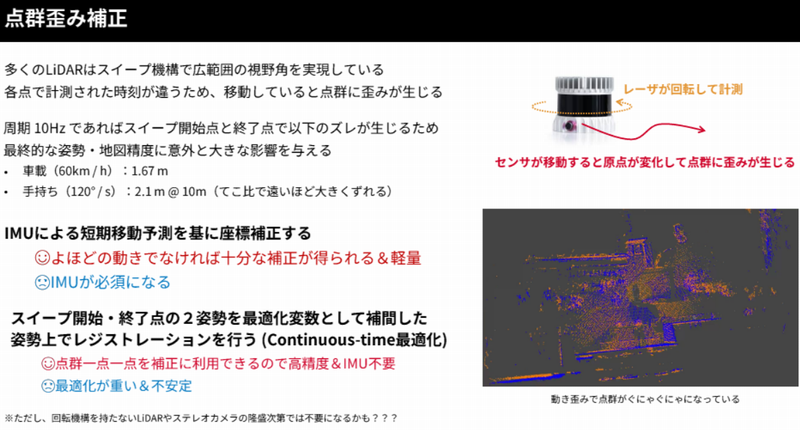
スイープ機構による点群の歪み
多くのLiDARは回転スイープ機構をもち,広い視野角を確保しています.しかし,1回転分(360°)のスキャンには一定の時間がかかり,各点が異なる時刻に計測されます.センサが移動している場合,スキャン中に位置が変化するため,得られる点群には歪みが生じます.たとえば周期が10HzのLiDARでは,スイープ開始点と終了点の間で物理的な移動が無視できません.
- 車載(60 km/h)では約1.67 mのずれ
- 手もち(回転速度120°/s,対象距離10 m)では約2.1 mのずれ
このずれは遠い点ほど大きくなり,姿勢推定や地図生成の精度に悪影響を与えます.ひずんだ点群を重ね合わせると,平面が湾曲したり,地図全体がぼやけた印象になります.リアルタイムSLAMではこの歪みを補正し,1スキャンを空間的・時間的に整合させる処理が必要です.
IMUによる歪み補正とその特徴
一般的な補正手法として,IMU(慣性計測ユニット)を用いる方法があります.IMUはスキャン中の短期的な移動予測を行い,各点の座標を補正します.これにより,スイープ中のセンサの動きを追従した座標変換が可能です.IMUを使う手法の特徴は以下のとおりです.
- 軽量かつ安定した処理が可能
- 人の目ではほとんど歪みを感じないほどの補正精度を実現
- IMUセンサが必須
この方法は実装が容易で,動きが激しくない環境では十分な精度を得られます.Jetson Orin Nanoの演算性能を利用することで,IMU情報とLiDAR点群をリアルタイムに融合し,軽量な歪み補正を行うことができます.
IMUなしの高精度補正:連続時間最適化
もう1つのアプローチとして,IMUを使わずにスイープ開始点と終了点の2姿勢を最適化変数とする「連続時間最適化(Continuous-time Optimization)」があります.この方法では,スキャン中の各点をその取得時刻に対応する補間姿勢上で再投影します.結果として,1点1点の補正を考慮できるため,より高精度な地図生成が可能です.
- IMU不要で高精度な補正が可能
- 姿勢推定の自由度が増えるため不安定になりやすい
- 最適化処理が重く,計算コストが数倍から十倍に増大
高精度ではあるものの,計算量の大きさからリアルタイム処理には不向きです.Jetson Orin NanoのGPU性能を生かしても,安定化や高速化の工夫が求められます.
歪み補正の今後
近年は,回転機構を持たないソリッドステートLiDARやステレオ・カメラが増えています.これらのセンサではスキャンによる時間的ずれが発生しないため,歪み補正自体が不要になる可能性があります.現状ではIMUを併用した補正が現実的ですが,センサ技術の進歩によって将来的にはよりシンプルなSLAM構成が主流になると考えられます.
〈著:ZEPマガジン〉
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.