











大域軌跡最適化とポーズ・グラフの実習ほか
Jetson Orin Nano×3D LiDAR:リアルタイムSLAM入門
ファクタ・グラフ最適化の利用
 |
|---|
|
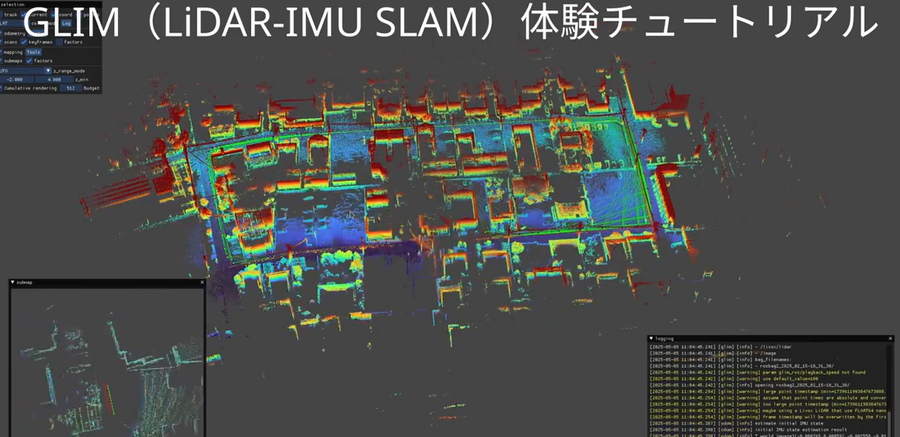
図1 「3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン」では,実用ICPの実装からGLIM体験まで,GPUキットを動かす実習がもりだくさん.現代のSLAMに必要な技術をひととおりマスタできる.画像クリックで動画を見る.または記事を読む.[講師]小出 健司 詳細:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン |
リアルタイムSLAM(Simultaneous Localization and Mapping)は,移動ロボットや自律移動システムにおいて,自身の位置を推定しつつ周囲の環境地図を同時に生成する技術です.Jetson Orin Nanoは高性能なGPUとCPUを備えた組み込み型AIコンピュータであり,3D LiDARから得られる点群データの処理をリアルタイムで行えます.SLAMシステムでは,センサ観測から得られる点群をもとに,各地点のポーズ(姿勢と位置)を連続的に推定します.
大域軌跡最適化とポーズ・グラフ
SLAMの精度向上には,複数地点のポーズ系列を統合して最適化する大域軌跡最適化が重要です.各地点の姿勢系列$A~E$を最適化対象とし,地点間の相対姿勢はスキャン・マッチングで推定します.地図全体の関係性は情報行列で表現され,最小2乗問題として解きます.通常の方法では情報行列が$N\times N$となり,地点数の2乗で計算量が急増します.
疎行列計算を利用することで効率化が可能です.地図生成問題は局所性をもつため,関連する地点間の情報だけを使用して計算できます.たとえばA-B間には関連がありますが,A-C間は関連がありません.この性質を利用することで,処理量は地図規模に比例し,計算を大幅に軽減できます.
ファクタ・グラフ最適化の利用
ファクタ・グラフは,局所性と疎性をもつ最適化問題を表現する強力な枠組みです.変数間の関係をグラフとして表し,観測に基づく整合性誤差をファクタとして定義します.すべてのファクタを合算した目的関数を最小化することで,ポーズ・グラフの最適化が実現されます.GTSAMなどのライブラリを用いることで,GNSS,IMU,カメラなど複数のセンサ観測を統合可能です.
ファクタ・グラフの利点は以下のとおりです:
- 大規模・高速な最適化が可能
- モジュラ設計により,変数や制約を部品化して組み合わせ可能
- 数千~数万の変数・制約を含む問題にも対応
- 最小2乗法により状態推定問題を統一的に記述可能
実践的なSLAMの流れ
実習では,Jetson Orin Nanoに接続した3D LiDARから取得した点群データを入力とし,以下の手順でリアルタイムSLAMを実行します:
- 各スキャン間のスキャン・マッチングにより相対ポーズを推定
- ポーズ系列$A~E$を大域最適化して整合性誤差を最小化
- ファクタ・グラフに観測制約を組み込み,GTSAMなどで効率的に解く
- 更新されたポーズ情報を用いて地図を生成・可視化
- 必要に応じてループ閉じ込み(Loop Closure)で過去観測との整合性を向上
この流れにより,Jetson Orin Nano上でリアルタイムに地図生成と自己位置推定を行い,複雑な環境でも安定したSLAM処理を実現できます.
〈著:ZEPマガジン〉
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.