










Access:283

低軌道衛星によるIoT通信システム設計
無線通信ソフトOAIによる遅延とドップラー対策
遅延補償とドップラー補正の設計
 |
|---|
|
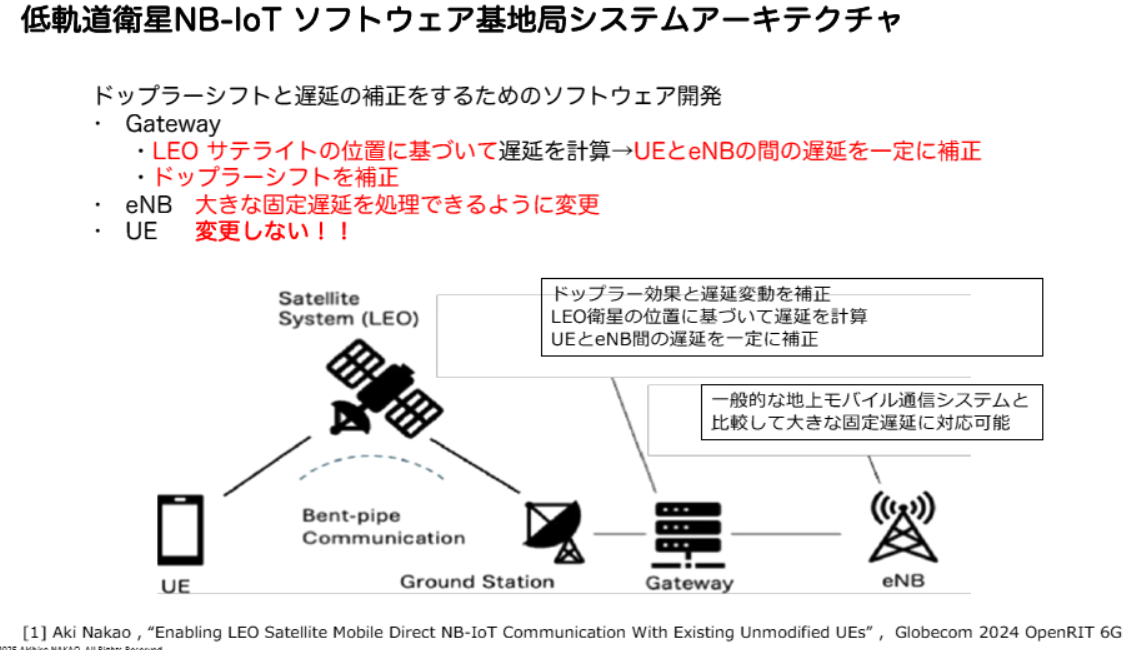
図1 低軌道衛星を用いたIoT通信システムでは,衛星の高速移動により発生するドップラー効果と伝搬遅延が通信品質に大きく影響する.画像クリックで動画を見る.または記事を読む.[著]中尾 彰宏 詳細:[VOD]広帯域ソフトウェア無線&フェーズドアレイANT開発要点100 |
低軌道衛星を用いたIoT通信システムでは,衛星の高速移動により発生するドップラー効果と伝搬遅延が通信品質に大きく影響します.
これらを補償するため,ソフトウェア基地局としてOpen Air Interface (OAI)を利用してシステムを構築します.
OAIを用いることで,ゲートウェイ側で遅延変動を固定遅延に変換し,通信を安定させることが可能です.
遅延補償とドップラー補正の設計
衛星の移動による遅延は,地上通信に比べ大きくなります.
そのため,ゲートウェイ側で以下の補正を行います:
- 衛星位置に基づき,伝搬遅延を計算し変動分を固定遅延に変換
- 周波数変動に対してドップラーシフトを計算し補正
- 端末側と基地局側でシーケンスのタイミングを調整
- RLC-AM (Acknowledge Mode)を有効にして,MAC層で無効化したSynchronous HARQを補完
- 衛星遅延を定期的に測定し,PDCCHやRACHを通じて通知しoffset windowを設定
これにより,NB-IoTの制御プレーンとユーザ・データ伝送において安定した通信が実現できます.
OAIを活用したプロトコルの検証
OAIを用いたソフトウェア基地局では,プロトコルスタックを柔軟に変更でき,NB-IoT Release 13に規定された初期アクセス手順を調整できます.
UEとeNB間で発生する長い遅延に対応するため,以下の変更を実施します:
- 端末から基地局へのアップリンクでHARQ再送要求を有効化
- 遅延変動を定期的に測定して端末に通知
- Control Plane Optimization Modeを適用し,ユーザ・データの制御プレーン経由伝送を可能に
- 必要に応じてOAIのオープン・ソースを改変し,安定動作を確保
これらの対応により,低軌道衛星環境下でもNB-IoTによるmassive Machine Type Communication (mMTC)サービスを提供可能です.
設計上の注意点
ドップラー補正や遅延補償は,端末側のタイミング調整と基地局側のプロトコル変更の両方で実施する必要があります.
地上モバイル通信システムとは異なり,固定遅延が大きく変動するため,定期的な測定と動的補正が不可欠です.
OAIをベースとしたソフトウェア基地局では,プロトコルの一部を変更してテスト可能であり,衛星通信環境特有の課題に対応できます.
〈著:ZEPマガジン〉
参考文献
- [VOD]MATLAB/Simulink×FPGAで作るUSBスペクトラム・アナライザ,ZEPエンジニアリング.
- [VOD/KIT]3GHzネットアナ付き!RF回路シミュレーション&設計・測定入門,ZEPエンジニアリング.
- [VOD/KIT]3GHzネットアナ付き!初めてのIoT向け基板アンテナ設計,ZEPエンジニアリング.
- [VOD/KIT]初めてのソフトウェア無線&信号処理プログラミング 基礎編/応用編,ZEPエンジニアリング.
- [VOD]Pythonで学ぶ マクスウェル方程式 【電場編】+【磁場編】,ZEPエンジニアリング.