
|
|---|
ロバスト制御のモデリング 実物との差分の表現
実物は複雑すぎて完璧なモデリングは不可能
ロバスト制御のモデリングとその実用化
|
|---|
| 図1 システムの不確かさに対して頑健な制御系を設計することを目指すのがロバスト制御.不確かさは,パラメータの変動や外乱など,制御対象が完全に予測できない要素を含む.[著・提供]南 裕樹.画像クリックで動画を見る.または記事を読む.詳細は[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】 |
ロバスト制御のモデリングとその実用化
1. 現実的なモデリング
制御理論において,制御対象を数学モデルとして表現することは非常に重要です.モデリングを行うことで,実物のシステムを数式や伝達関数,状態空間モデルで表現し,制御の設計やシミュレーションを可能にします.例えば,DCモータの動きをモデル化することで,回転速度やトルクを予測しやすくなり,シミュレーションによって制御則の設計が可能です.
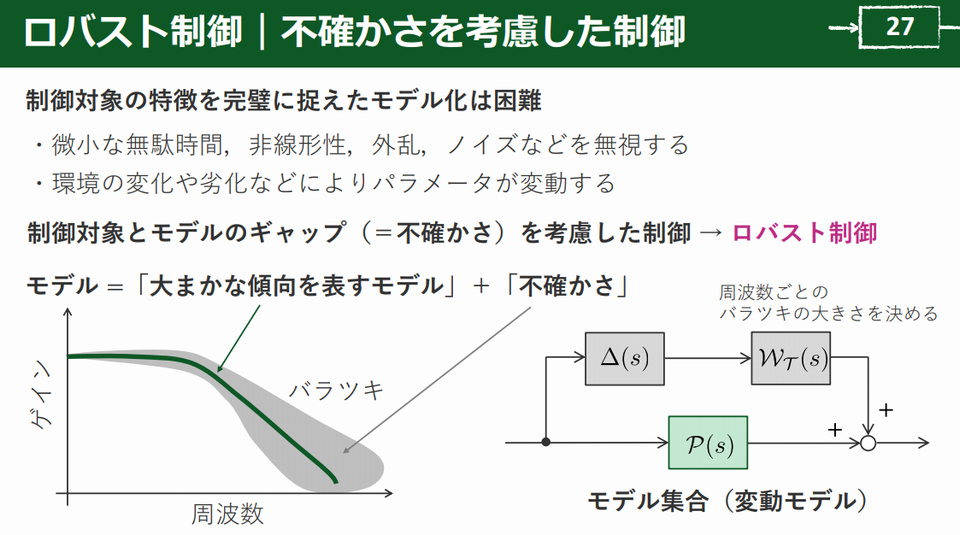
しかし,実際の物理システムを完全にモデル化することは難しく,多くの場合,以下のような不確かさが残ります.
\[ \text{モデル} = \text{傾向を表すモデル} + \text{不確かさ} \]
この不確かさを考慮に入れた「ロバスト制御」が重要です.
2. ロバスト制御の基本原理
ロバスト制御では,システムの不確かさに対して頑健な制御系を設計することを目指します.不確かさは,パラメータの変動や外乱など,制御対象が完全に予測できない要素を含みます.このような要素があっても,安定な制御を維持できるようにすることがロバスト制御の目的です.
例えば,制御対象の数学モデルがあれば,以下のような利点が得られます.
- シミュレーションによる性能評価
- 不確かさに対するロバスト性の評価
- 最適設計による性能向上
- 可制御性と安定余裕の確認
これにより,設計の試行錯誤が減少し,仕様を満たす設計がより効率的に行えます.
3. モデルベースの制御設計
ロバスト制御を適用するための設計手法の1つに,ループ整形法や混合感度問題などがあります.ループ整形法では,開ループ系のゲイン調整によって安定余裕やノイズ除去を図り,閉ループ系においては感度低減化問題を解決するために$H_{\infty}$制御が利用されます.
例えば,$H_{\infty}$制御では,ゲインと安定性の関係を評価し,システム全体の不確かさに対して適切なフィードバックを設計します.
ロバスト制御の現実的な活用
1. 実世界の制御対象のモデル化
制御理論で理想的なモデルが得られても,実際のシステムではさまざまな不確定要素が存在します.温度変化や摩耗,部品の経年劣化など,システムのパラメータが時間とともに変動するため,これらを完全にモデルに反映することは不可能です.そのため,制御理論では実際のシステムとの差分(不確かさ)を含めて設計を行います.
\[ \begin{align*} & \text{ロバスト制御} = \text{モデル化} + \text{不確かさ} \end{align*} \]
このような考え方に基づき,ロバスト制御では,不確かさを適切に扱うことで,予期せぬ動作や外乱に対しても安定な制御を実現します.
2. ロバスト制御の設計プロセス
ロバスト制御の設計では,システムの特性を理解し,不確かさを定量的に扱います.例えば,以下のようなステップが含まれます.
- モデルの定義 制御対象の動作を伝達関数や状態空間モデルで表現.
- 不確かさの考慮 モデルと実際のシステムの差異や外乱,パラメータの変動を考慮した設計.
- 制御則の設計 フィードバック制御系やフィードフォワード制御などを組み合わせ,ロバスト性を確保する制御則を策定.
例えば,状態フィードバック制御では,システムの状態変数を用いてリアルタイムでの制御を行い,外乱やシステムのパラメータ変動に対しても適応可能な制御を実現します.
\[ \begin{align*} & \text{制御入力} = K \cdot \text{状態変数} \end{align*} \]
3. 実装とシミュレーションの重要性
ロバスト制御の設計が理論的に完成しても,実際のシステムに実装する段階で多くの課題が浮上します.そこで,シミュレータを活用し,事前に設計を検証することが重要です.MATLABやPythonを用いたシミュレーションは,制御則が適切に機能するかどうかを確認するために役立ちます.
このようにして,ロバスト制御は実世界の不確かさに対応し,安定で効率的な制御を提供します.〈ZEPマガジン〉
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.