
|
|---|
ボリュームで角度制御!ステッピング・モータのArduinoプログラミング
1相励磁/1-2相励磁/2相励磁のプログラミング
1パルス当たり0.1°!保持トルクで静止安定
|
|---|
|
図1 1-2相励磁のステッピング・モータは,隣接するインダクタを同時に励磁するため,安定した保持トルクが得られる.出力軸の1回転あたりに必要なパルス数も増えるため,より細かい角度で制御できる.画像クリックで動画を見る.または記事を読む.
詳しくは,DigiKeyチャンネル |
ステッピング・モータによる精密な角度制御
ステッピング・モータは,パルス信号によって駆動され,入力パルス数で回転角度,パルス周波数で回転速度を制御できるモータです.この特性により,3Dプリンタやコピー機など,多くの精密機器で広く用いられています.
ステッピング・モータの基本構造は,回転子としての永久磁石と複数のインダクタで構成され,インダクタを順に励磁することで一定角度ずつ回転するしくみです.28BYJ-48では,64ステップで1回転するため,1パルスで約0.087°の高い角度分解能が得られます.
精密な角度分解能を実現するための構成
ステッピング・モータの角度制御は,インダクタの励磁シーケンスによって行われ,4ステップの励磁(1相励磁,2相励磁など)により異なる回転角度や保持力が生じます.
1相励磁方式では単一のインダクタだけを励磁するため低消費電力で動作しますが,保持トルクが低くなります.これに対し,1-2相励磁方式では隣接するインダクタを同時に励磁することで,安定した保持トルクを得られます. ギアを内蔵するステッピング・モータ(28BYJ-48など)を使うと,出力軸の1回転あたりに必要なパルス数が増えるため,より細かい角度で制御できます.
Arduinoによるステッピング・モータ制御実験
Arduinoとモータ駆動IC(ULN2003Aなど)を利用すると,簡単にステッピング・モータの制御実験が可能です.
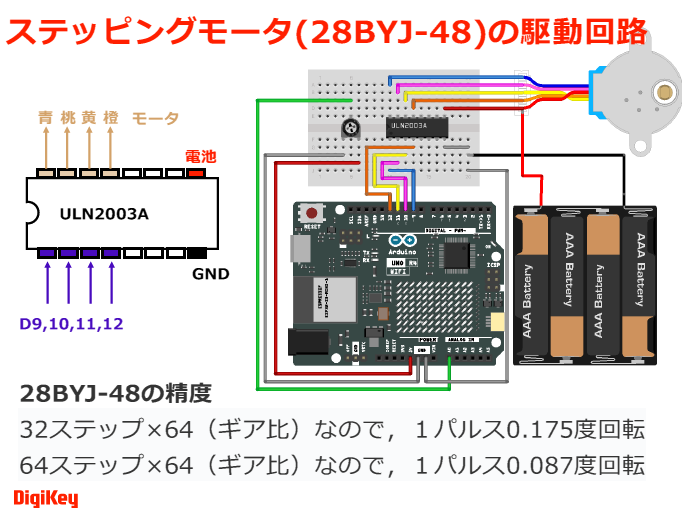
Arduinoのディジタル・ピン(例:D9, D10, D11, D12)からULN2003Aを介してモータの各インダクタに信号を送り,ポテンショメータで速度を調整します.
各ディジタル・ピンは順次励磁の役割を果たし,$D9$ピンを“H”,ほかのピンを“L”とすることで1ステップ目が実行され,次に$D10$ピンを“H”にすることで2ステップ目が実行されます.これを繰り返すことで,ステッピング・モータがスムーズに回転します.
ステッピング・モータの角度分解能とトルク特性に関する技術的な解説
ステッピング・モータの角度分解能や保持トルクは,駆動方式や内部ギア構造に大きく依存します.角度分解能は,1ステップあたりの回転角度として定義され,28BYJ-48モータではギア比64:1が組み込まれているため,32ステップの励磁サイクルにより出力軸が1回転します.この場合,1パルスあたりの回転角度$\theta$は次のように計算できます:
\[ \theta = \frac{360°}{32 \times 64} = 0.175° \]
より高精度な制御が必要な場合,1-2相励磁を用いることで64ステップで1回転とし,角度分解能を0.087°に向上させることが可能です.また,インダクタに対する励磁方法を工夫することで,より高い保持トルクも得られます.保持トルクは特に,固定位置での角度保持が重要となる応用で重要であり,2相励磁や1-2相励磁が推奨されます.〈著:ZEPマガジン〉
チャプタ・リスト
- 1:16 ステッピング・モータとは
- 2:51 駆動回路
- 4:26 1相励磁制御
- 6:31 2相励磁制御
- 8:40 1-2相励磁制御
- 9:14 角度制御
動画講師「南 裕樹」紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
南 裕樹 著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.