
|
|---|
今さら聞けない電子回路入門 DCモータが回るメカニズム
高校生から始めるArduinoマイコンプログラミング実験室 第3回
DCモータの基礎とマイコンを使った制御
|
|---|
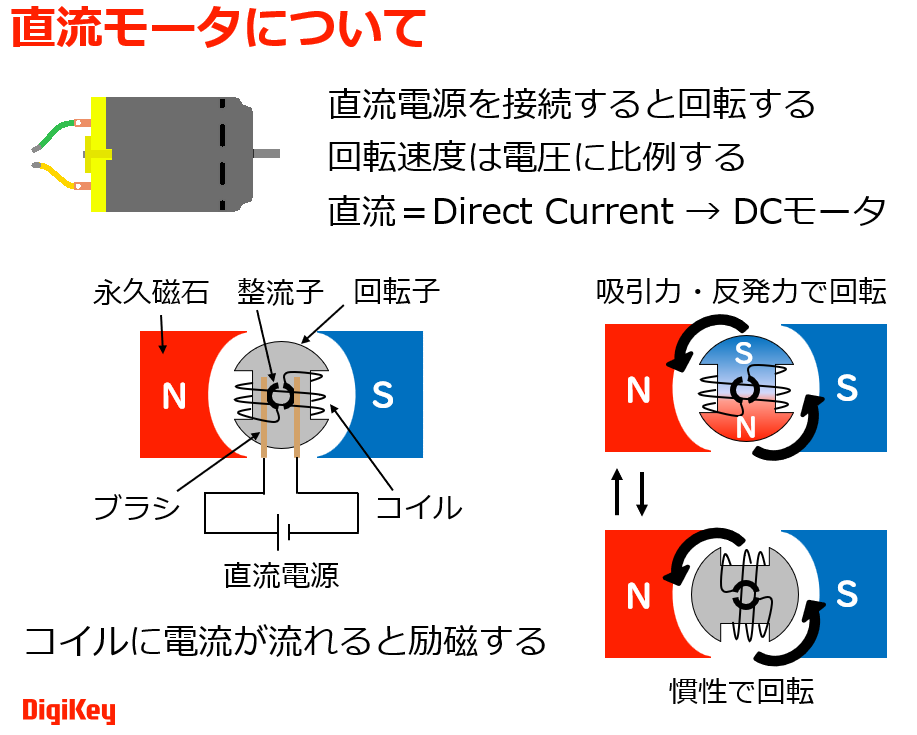
| 図1 直流電圧を加えると回り出すDCモータは,永久磁石,整流子,ブラシで構成される.その回転のメカニズム,速度制御,ノイズ対策,駆動回路を復習する画像クリックで動画を見る.または記事を読む.DigiKeyチャンネル |
基礎知識
1.DCモータの基本構造と動作原理
直流電圧を加えることで簡単に回転できるDCモータは,家電製品やおもちゃに幅広く利用されています.その回転速度は加えた電圧に比例します.主な構成要素は次のとおりです.
- 永久磁石 固定された磁場を生成
- ロータ(回転子) インダクタを巻いた部分で,電流を受けて回転
- ブラシと整流子 電流の極性を切り替え,モータがスムーズに回転するのを助ける
整流子は,回転の途中でブラシとの接触を切断し,慣性でロータが回転を続けます.その後,再接触によって電流が再び流れ,N極とS極の吸引力と反発力で回転が維持されます.この連続的なプロセスによって,モータはスムーズに回転を続けます.
2.DCモータ駆動回路の設計と安全対策
マイコンで直接モータを駆動すると,必要な大電流に耐えきれず,回路が破損する恐れがあります.そのため,トランジスタを用いて次のような駆動回路を設計します.
- トランジスタ DCモータを直接マイコンに接続すると,モータの駆動に必要な大電流(数百m~数A)によってマイコンが破損する危険があります.そのため,トランジスタを用いたスイッチング回路が一般的に使用されます.動画(図1をクリック)では,マイコンのI/O端子にNPN型トランジスタ 2N2222Aを接続して,安全にモータ駆動に必要な大電流を制御しています
- ダイオード モータ停止時に発生する逆起電力を転流によって抑制し,トランジスタを過電圧破壊から保護します
- キャパシタ モータの回転で発生するノイズを吸収します
3.Hブリッジ回路で双方向制御
モータを正転・反転させるには「Hブリッジ回路」を使います.この回路では,4つのトランジスタまたはモータ・ドライブIC(L293Dなど)が使用されます.Hブリッジ回路では,電流の流れる方向を切り替えることで回転方向を制御します.
4.PWM制御で速度制御
PWM(Pulse Width Modulation)制御は,モータの回転速度を調整するために用います.デューティ比(1周期のうち,信号がHIGHの時間の割合)を変えることで,平均電圧が変化し,回転速度が変わります.
モータが出すノイズへの対応
ダイオードの役割
モータはインダクタンス成分をもつため,スイッチング操作によって電流が急に遮断されると,逆起電力(サージ電圧)が発生します.この瞬間的な高電圧がトランジスタなどの回路素子を破壊する可能性があります.
モータと並列に接続するダイオードは,電流の逆流を防ぎ,サージ電圧が発生した際に電流をモータに還流させる役割を果たします.このダイオードを「フリーホイール・ダイオード」と呼びます.電流が切れた後もモータを保護し,安定した動作を実現します.
キャパシタの役割
DCモータの回転中にはノイズが発生し,電源ラインを通じて回路全体に干渉を与える可能性があります.このノイズを吸収するために,モータにキャパシタを並列接続します.
キャパシタは電圧の変動を平滑化する働きをもち,スイッチング・ノイズや高周波の干渉を抑制します.これにより,マイコンやほかの電子回路に悪影響を与えず,安定した制御が可能になります.〈著:ZEPマガジン〉
チャプタ・リスト
- 1:17 直流モータの回転のメカニズム
- 3:00 直流モータの駆動回路
- 4:14 直流モータを回す実験
- 5:44 PWMで回転速度を変える実験
- 6:15 正転/反転の切り替え回路「Hブリッジ」
- 7:14 正転と反転を切り替える実験
- 9:17 プログラムの説明
- 10:24 マイコンとパソコンで読み取る
- 10:49 パソコンからマイコンに指令を送る
- 11:09 パソコンでマイコンの制御とモニタをする実験
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.