








姿勢角測定に向くのは:GNSSコンパス? vs IMU?
センチ・メートル測位「キネマティックGNSS」の始め方
|
|---|
| GNSSコンパスとINS/GNSSは結果が一致するが,GNSSコンパスは真北を知る利点があり,INS/GNSSはオフセット調整が必要である.両者を組み合わせることで精度向上が期待できる 〈著:樋田 啓〉 |
| 【PR:4月10日開催】:L6対応!最新u-blox X20P RTKキットで学ぶGNSSセンチメール測位 |
| 画像クリックで動画を見る.または記事を読む |
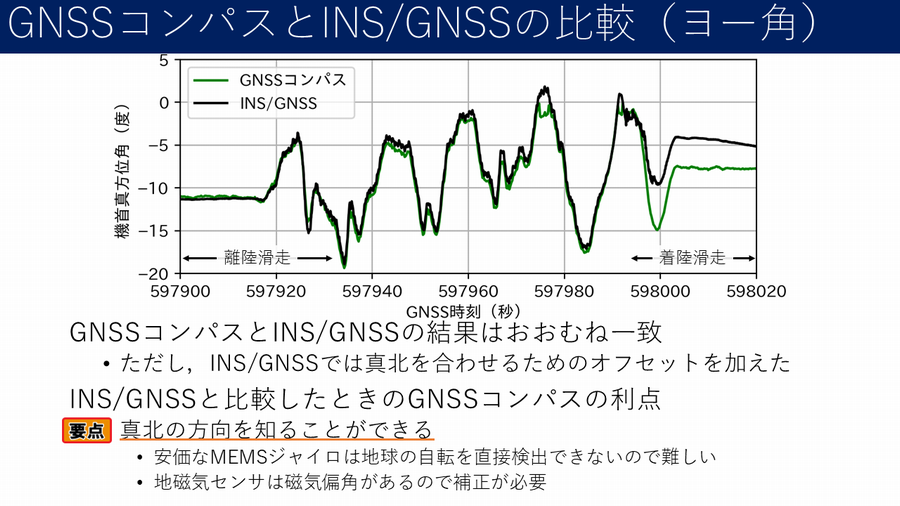
GNSSコンパスとIMU(INS/GNSS)の姿勢角測定の比較
姿勢角の測定においてGNSSコンパスとINS/GNSS(慣性計測装置とGNSSの融合)の結果はおおむね一いたします.INS/GNSSでは真北方向を合わせるためにオフセット補正を加える必要があります.GNSSコンパスの大きな利点は真北の方向を直接知ることができる点です.安価なMEMSジャイロは地球の自転を直接検出できず,地磁気センサも磁気偏角の補正が必要になるため,真北の検出には課題があります.
また,GNSSコンパスは離陸や着陸滑走中の振動に強い特徴があります.これはINS/GNSSと比較した際の優位点の1つです.一方で,超音波距離計とINS/GNSSの結果には多少のオフセットが見られ,地面の完全な平坦性が保たれていない影響が考えられます.
GNSSコンパスとIMUの特徴と組み合わせの課題
IMUの完成センサはドリフトが大きく,長時間放置すると姿勢角がずれてしまう問題があります.データレートは高く,安価なセンサでも1kHz程度の取得が可能です.対してGNSSモジュールは一般的にデータレートが低めで,アンテナの設置に場所を要するため小型機器への搭載には工夫が必要です.
IMUは振動に弱いものの,GNSSは比較的強い耐性をもっています.IMUではローリング(横回転)の検出が可能ですが,GNSSでは難しいです.これらの特性を活かし,カルマン・フィルタなどのアルゴリズムで両者を組み合わせる方法がよく用いられます.よい点を取り入れて精度向上を図れます.
ただし,リアルタイム処理には注意が必要です.IMUはサンプリングと通信遅延が短く,ほぼリアルタイムでの計算が可能です.GNSSデータはタイムスタンプ付きで届きますが,受信に100msから200ms程度の遅延が生じることがあります.この遅延を考慮しないと,異なる時刻のデータを組み合わせて誤差が生じます.
センチメートル測位「キネマティックGNSS」の始め方と遅延対策
遅延対策の一例は,IMUの計算結果をすべて保存し,GNSSデータ到着時に逆順で計算をやり直す方法です.これにより時間を合わせてデータ融合が可能になります.もう1つの方法は遅延の小さいGNSSモジュールを選択することです.
たとえば,一般的なGNSSモジュールでは通信込みで約100msの遅延が生じます.高性能なモジュールでは10ms以下に抑えられるものもあります.こうしたモジュールはリアルタイム制御用途にも適しています.性能向上を目指す場合は,通信速度や取得データ量のスペックを十分に確認する必要があります.
センチメートルレベルの精度を目指すキネマティックGNSSの導入は,測位精度だけでなくデータ取得の遅延やセンサ特性を理解し,適切に組み合わせることが重要です.これにより姿勢角の高精度測定が実現できます.
〈著:ZEPマガジン〉参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/data]GPU/CPU/量子コンピュータによるサイバーセキュリティ実践プログラミング,ZEPエンジニアリング株式会社.
« ZEPマガジン前の記事「計測点以外の量「状態」を推定!オブザーバとカルマン・フィルタ」