
|
|---|
安全性goodな制御工学教材!M5Stamp Flyドローン誕生
本体50ドル!コントローラ込2万円以下!飛行制御ファームウェア無料
ドローンの姿勢制御オープンソースを実装!M5Stamp Flyの魅力と特徴
|
|---|
|
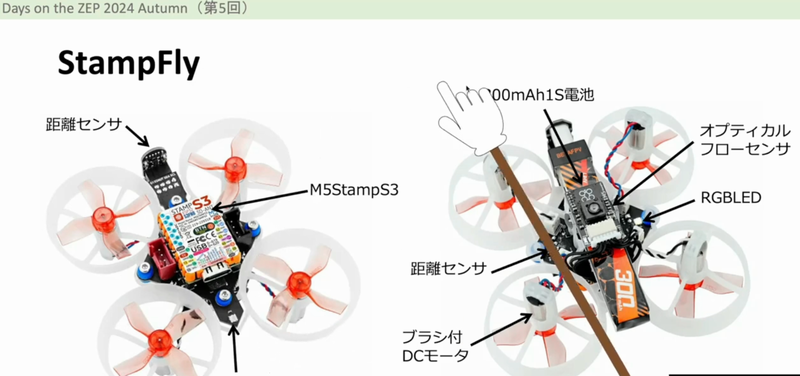
図1 M5Stamp Flyは,教育現場での利用を考慮し,プロペラに指を入れても安全な構造を採用している.Wi-FiやBluetooth通信にも対応し,ESPNowプロトコルを用いたリモート・コントロールが可能.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤 恒平. 詳細:[受講無料,簡単登録]LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100 セッション1 |
M5Stamp Flyは,手のひらサイズのクアッド・ コプタ(四旋翼無人機)で,50ドルという低価格で提供され,制御工学の教材やプログラミング学習用のツールとしても注目されています.
このドローンは,姿勢制御や安全性の高い設計を実現するために多くのセンサとリアルタイムOSを搭載しており,教育現場での利用を意識した設計がされています.本製品はスイッチサイエンスで購入可能で,教育用途や研究用途に広く利用されています.
高性能な姿勢制御機能
M5Stamp Flyには,姿勢推定を可能にする加速度センサとジャイロ・センサ,さらに飛行中の高さを把握するための気圧計が内蔵されています.また,オプティカル・フロー・センサが床面の模様を分析し,移動量を高精度に推定します.
制御用マイコンを搭載し,リアルタイムOS上でC++を用いたプログラミングが可能です.これにより,高度な飛行制御アルゴリズムを自作し,姿勢を自由に調整できます.
安全性と低価格での教育利用
プロペラには指を入れても安全な構造が採用され,教育現場での利用を考慮した設計になっています.M5Stamp Flyは,手軽に入手可能な上,Wi-FiやBluetooth通信にも対応し,ESPNowプロトコルを用いたリモート・コントロールが可能です.
2万円以下でコントローラと本体を含めたシステムを構築できるので,制御工学の入門教材として最適です.また,ファームウェアはGitHubで公開されており,自由にダウンロードしてプログラムを作成・改良することが可能です.スイッチサイエンスのオンラインストアで購入できるため,手軽に取り組める教材としてさらに魅力的です.
M5Stamp Flyで学ぶ姿勢制御と制御工学の基礎
姿勢制御に必要な基礎概念には,制御工学の主要な理論が含まれています.PID制御(比例・積分・微分制御)はドローンの姿勢を安定させるための基本的な制御方法です.
PID制御を通して,$L_r$(リアクタンス)や$V_{in}$(入力電圧)といった制御パラメータの調整に関する理解が深まります.これらのパラメータは,回転数や飛行高度を調整するために使用されるため,M5Stamp Flyを使ったプログラミング学習では,実際のフィードバック制御を体験することが可能です.
M5Stamp Flyに搭載されている複数のセンサ情報を統合し,姿勢制御に必要なリアルタイム・データ処理も実践できます.このような実習を通して,実際の物理環境で動作する制御プログラムの基礎知識を身に付けることができるため,教育現場での利用が期待されています.
姿勢制御の重要性とその原理
姿勢制御とは,ドローンの傾きや向きを適切に維持するための制御手法であり,安定した飛行に欠かせない要素です.姿勢制御において重要な役割を果たすのが,ジャイロ・センサと加速度センサです.
ジャイロ・センサは角速度を測定し,ドローンの回転を検出します.一方,加速度センサは,重力を基準としてドローンの傾きを推定します.これらのセンサのデータを基に,PID制御を用いて目標角度に対する姿勢調整を行います.
M5Stamp Flyを使ってこれらの制御を実装することで,センサから得られたデータを処理し,制御信号に変換する流れを学ぶことができます.このプロセスを通じて,制御工学の理論を現実のシステムに応用する際のポイントを深く理解でき,特に教育用として有益な教材になります.〈著:ZEPマガジン〉
著者紹介
- ドローンやロボットの自作を通じて制御工学や関連技術の生涯勉強情報を提供
- 防衛大学大学校 航空宇宙工学教室,筑波大工学博士
- 陸自入隊,対戦車誘導弾などの装備品開発,国際高専教員,金沢工業大学教員
- ロボット・ランサ優勝,マイクロマウス・ニューテクノロジー賞受賞,指導者としてつくばチャレンジバンナム賞,飛行ロボコンマルチコプタ部門1位など
- 北海道函館出身,工学博士
著書
- つぶやき制御工学(YouTube)
- 理系的な戯れ(ブログ)
- こうへい(Kouhei Ito),Xに技術情報等をポスト
参考文献
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.