











LiDARの測定基準ズレと移動による点群歪み
Jetson Orin Nano×3D LiDARでリアルタイムSLAM
|
|---|
| LiDARによる点群ひずみ補正は,スイープ機構による計測時の時間差で生じるひずみを解消する手法であり,IMUを用いた短期移動予測や,姿勢最適化による高精度な補正が求められる 〈著:小出 健司〉 |
| 【出典】:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ 高精度リアルタイムSLAM&センサ・フュージョン |
| 画像クリックで動画を見る.または記事を読む |
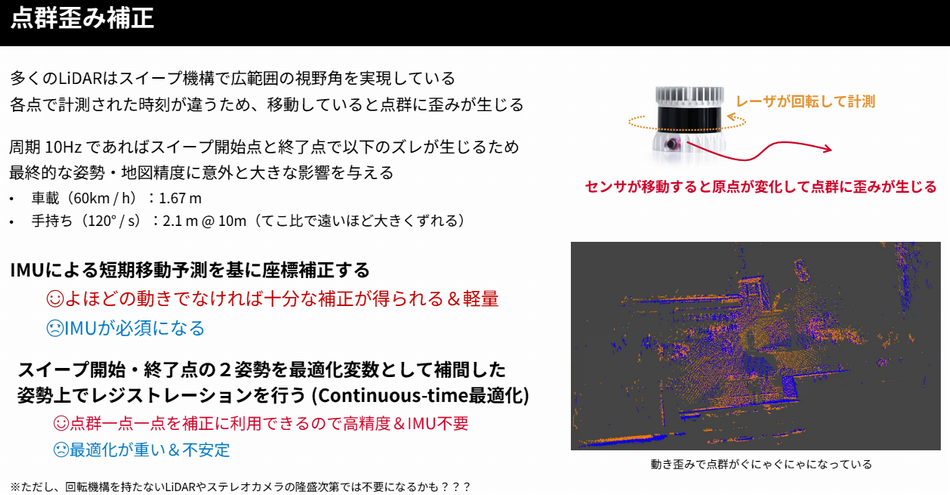
LiDARの測定基準ずれと点群ひずみの発生メカニズム
多くのLiDARはレーザを回転させるスイープ機構を用いて360°の広範囲視野を確保しています.レーザが回転しながら順次点群を取得するため,各点の計測時刻は異なります.センサ自体が移動している場合,スイープ開始時点と終了時点でのセンサ位置や姿勢が異なるため,点群全体にひずみが生じます.このひずみは点群の原点が動くことによって発生し,移動速度や回転速度が大きいほど影響が顕著になります.
例えば,周期10HzのLiDARを搭載した車両が時速60kmで走行すると,スイープの開始点と終了点で約1.67mの位置ずれが生じます.手もちで120度毎秒の回転速度がある場合,10m先の物体で最大2.1mのずれが生じます.距離が遠いほどてこ比の影響でずれが大きくなり,これが点群の精度低下や地図の品質悪化につながります.
点群ひずみ補正の手法と特徴
点群のひずみを補正する手法は大きく2つにわかれます.1つ目はIMU(慣性計測装置)を利用する方法です.IMUから得られる短期的な移動情報を元に,スイープ開始点から各計測点までの座標変換を行います.この方法は動きが激しくない限り十分な補正効果があり,処理負荷も軽く安定したシステムを構築できます.ただし,IMUを搭載する必要がある点が制約になります.
2つ目はIMUを使わずにスイープ開始点と終了点の姿勢を最適化変数として連続時間最適化を行う方法です.これは姿勢を補間しながら点群の各点を補正できるため高精度な補正が可能です.IMU不要である代わりに計算コストが非常に高く,不安定になりやすいという欠点があります.姿勢の自由度が増えることで最適化が破綻しやすく,実用的な運用には工夫が必要です.
最近の距離センサと今後の展望
近年は回転機構を持たない固体型LiDARやステレオ・カメラの利用が増えています.これらのセンサはスイープ機構を使わないため,計測時刻のずれによる点群ひずみが発生しません.将来的にはこうしたセンサの普及により,従来のスイープ型LiDARで必要だった複雑なひずみ補正が不要になる可能性があります.
現状ではIMUを用いた補正が実用的かつ安定的な手法として広く用いられています.回転機構をもつLiDARの特徴を理解し,適切な補正を施すことがリアルタイムSLAMや高精度な地図生成には重要です.Jetson Orin Nanoのような高性能な組み込みコンピュータと組み合わせることで,リアルタイム処理が可能となり,移動ロボットや車載システムでの活用が進んでいます.
〈著:ZEPマガジン〉参考文献
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.
- [VOD/Full KIT/data]ラズパイとPythonで一緒に!カルマン・フィルタ&センサ・フュージョン入門,ZEPエンジニアリング株式会社.
- [VOD/KIT/data]M5Stamp Flyで学ぶ ドローン制御プログラミング入門,ZEPエンジニアリング株式会社. [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.