











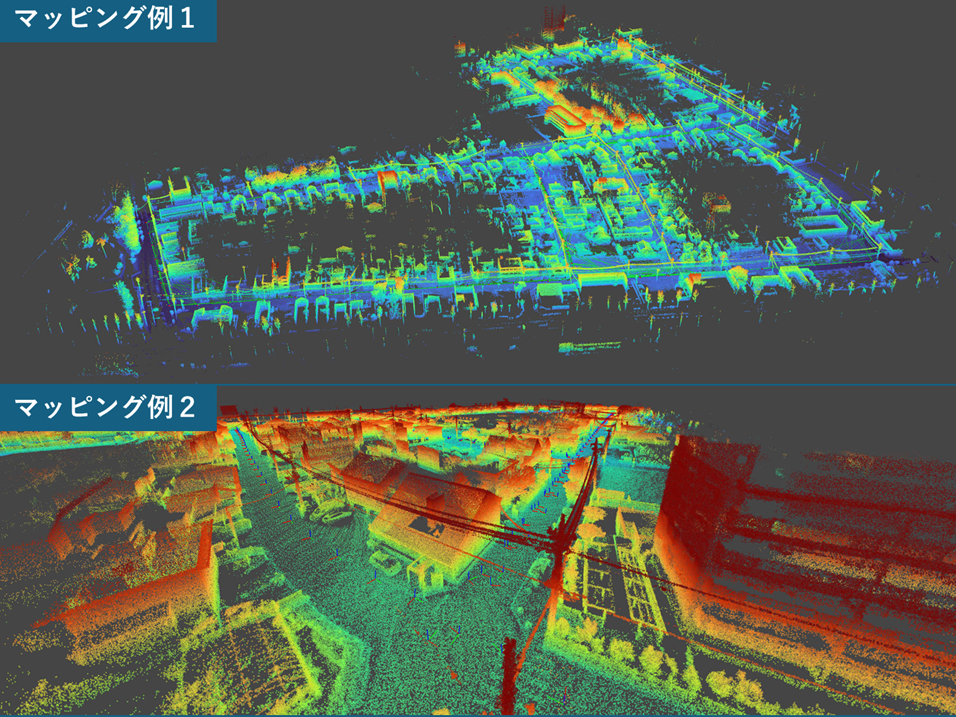
フレーム前後の点群位置を補正する高精度地図生成アルゴリズム
Jetson Orin Nano×3D LiDARでリアルタイムSLAM入門
|
|---|
| 3次元LiDARを用いたSLAM技術の基礎から応用までを学び,点群処理の実装実習を通じて実践的なスキルを習得する内容である 〈著:小出 健司〉 |
| 【出典】:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ 高精度リアルタイムSLAM&センサ・フュージョン |
| 画像クリックで動画を見る.または記事を読む |
フレーム間点群位置補正の基礎
3次元LiDARによる点群データは,自動運転やサービスロボットの自己位置推定や環境地図生成に不可欠です.複数フレームの点群を正確に重ね合わせるために,フレーム間の相対位置と姿勢を補正するアルゴリズムが必要です.ここで紹介する手法は,ICP(Iterative Closest Point)に基づき,あるフレームのソース点群を別のターゲット点群に対して位置合わせするものです.
まず,ソース点群の各点に対して,現在の相対姿勢を用いて座標変換を行います.相対姿勢は回転行列$R$と平行移動ベクトル$T$で表され,変換後の点は$R$をかけた後に$T$を加える形で計算します.変換したソース点にもっとも近いターゲット点を,KD木構造を使った高速探索で特定します.この対応付けは,ターゲット点とソース点のインデックスのペアとして保存されます.
誤差計算と可視化
対応付けが得られた後,各対応点の距離誤差を計算します.変換後のソース点と対応するターゲット点の差のノルムを計算し,その値を誤差の総和に加算します.この総誤差は位置合わせの精度を示し,値が小さいほど良好なマッチングを意味します.
実装では,赤色のソース点群と青色のターゲット点群がそれぞれ表示され,対応点間は緑色の線で結ばれます.ユーザがソース点群を手動で動かすことにより,誤差がどのように変化するか確認可能です.誤差値が減少する方向に動かすことで,点群の重なりが視覚的にも数値的にも改善するようすがわかります.
自動化と最適化の重要性
手動での位置合わせは直感的に理解しやすい反面,精度や効率の面で限界があります.誤差最小化を自動で行う最適化手法の導入が必要です.最適化アルゴリズムは,初期の相対姿勢を適切に設定することで収束性を高め,より正確なマップ生成に寄与します.
このような点群SLAMの基礎技術を理解し,Jetson Orin Nanoなどの組み込みプラットフォームと3D LiDARを用いてリアルタイムで処理することが,現代の自律システム開発において重要なスキルになります.実際の開発では,ICPによるスキャン・マッチングからファクタ・グラフ最適化を経て,センサ・フュージョンによる高度な自己位置推定まで段階的に技術を習得していきます.
- ソース点群の変換:回転行列$R$と平行移動ベクトル$T$を用いる
- KD木を使った最近傍点探索で対応付けを取得
- 対応点間の距離誤差を計算し総和を求める
- 可視化による手動調整と誤差の観察
- 誤差最小化のための自動最適化アルゴリズムの導入
参考文献
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.
- [VOD/Full KIT/data]ラズパイとPythonで一緒に!カルマン・フィルタ&センサ・フュージョン入門,ZEPエンジニアリング株式会社.
- [VOD/KIT/data]M5Stamp Flyで学ぶ ドローン制御プログラミング入門,ZEPエンジニアリング株式会社. [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.