




Access:410
Python/Linux/OS
Linuxなどの定番OSを搭載するボード・コンピュータのプログラミング技術や,PythonやRを使った計測データの主性成分分析,可視化,パターン認識の技術などを解説します.
ZEPマガジン
 |
USBカメラのキャプチャ&描画プログラム “OpenCV”というライブラリを利用すると,数十行のPythonまたは C++コードで本格的な画像処理を実現できる |
 |
IoT開発向けPythonマイコン M5Stack実験室[M5Stack親切マニュアル] Python言語で記述されたソースコードを機械語に翻訳するインタープリタ・ファームウェア MicroPythonをM5Stackに搭載されたESPマイコンの内蔵フラッシュ・メモリに書き込む. |
 |
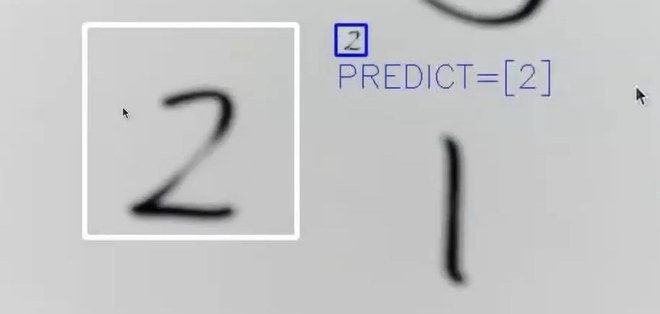
ラズパイで作るAI OCR 手書きの文字を読む ディープラーニングの学習には,誤差関数や最適化アルゴリズムが重要な役割を果たす.活性化関数や学習率の調整によって,モデルの精度が大きく変わる |
 |
ニューラル・ネットワークの軽量化と推定精度の維持 エッジAIデバイス用のCPUは,計算リソースと消費電力の制約が厳しく,ニューラル・ネットワークの軽量化と精度の両立が必須 |
 |
明日,沖縄県の天気は?AIスピーカの制作 自然言語処理で日時と地域を識別し,気象庁のWebサービスを通じてデータを取得.さらに音声合成技術を組み合わせて対話型天気予報システムを構築 |
 |
ラズパイ×Node-REDでスピード制作 Weather時計のデモ Node-REDのexecノードやラズパイ向け音声合成エンジン AquestalkPiを使って,時刻と天気予報を音声で読み上げるIoTデバイスをスピード制作 |
 |
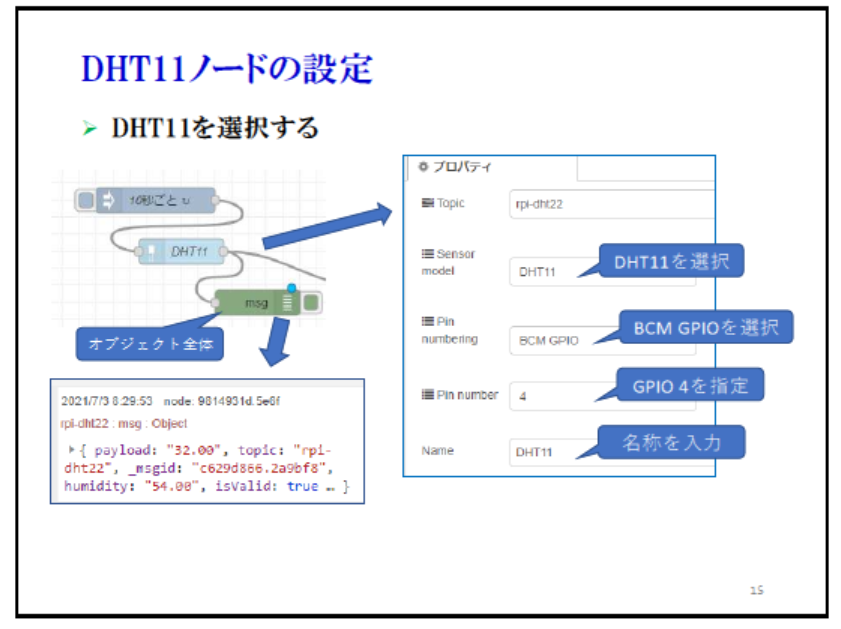
ラズパイで作るリアルタイム温湿度計 Node-REDのダッシュボードの設定でゲージやグラフの表示を柔軟にカスタマイズできる.ラズベリー・パイを使ってノーコードでリアルタイム温湿度計を制作 |
 |
操作ボタンもメータもNodeRedで簡単制作 Node-REDのdashboardを使うことで,buttonやsliderなどインターフェースを作成できる.ノーコードでIoT向けのGUIを簡単に構築可能だ |
 |
マイコンの機能アップ 鍵はI2C SDA(データ)とSCL(クロック)の2本の配線を用いるシリアル通信プロトコルI2Cを備えるICは多い.マイコンの機能拡張の初めの1歩はI2Cの習得 |
 |
サーバもエッジも!スピード・アプリ制作 ノーコードでIoTアプリケーションを開発できる視覚的プログラミング環境「Node-RED」を使って,センサ・データの処理やクラウドとの連携も簡単に実現できる |
 |
ROS×ラズパイ SLAMロボット入門 ROSの複数のアプリを自動で起動するLaunchファイルを用意して複数のノードをまとめて起動することで,SLAMロボットは短時間で地図作成や自己推定を開始できる |
 |
ラズパイ×ROS SLAMロボット開発 ロボット開発用ミドルウェアROSを実装したラズベリー・パイ・ホストで,Wi-Fiマイコンを搭載したクライアント・ローバからIMUセンサ情報をリモート受信 |
 |
初めてのラズパイ×ROS SLAMロボット開発 Gmappingはパーティクル・フィルタを用いたSLAMアルゴリズムを実装し,地図をリアルタイムに生成する.位置や姿勢の仮説の1つ「パーティクル」の数を増すことで推定精度が上がる |
 |
競合を回避するしくみ FreeRTOSは,組み込みシステム向けの軽量でシンプルな定番のリアルタイムOS.その機能はタスクの競合を回避する優先順位管理やスケジューリング |
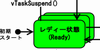 |
マルチタスク・プログラミングの初めの一歩 タスクは,初期化部とアプリケーション部で構成され,ステートマシン形式で設計される.状態遷移を制御することで,初期化や繰り返し処理を効率よく実行できる |
 |
インターネット通信もセンサ計測も並行処理!マルチタスクIoTを作る IoTエッジのマイコンには,インターネット通信,センサ計測,LCD表示など,多種多様なタスクを並行して処理する能力が求められる.解決のかぎはリアルタイムOS(RTOS)の導入 |
 |
SLAMロボット入門 部屋の形をLiDAR計測 SLAMはLiDARやIMUを使って地図を作り,自分の位置を推定する技術.ラズベリー・パイとESP32マイコンを使って,環境変化に柔軟に適応するROS搭載SLAMロボットを自作 |
 |
お話 量子コンピュータ入門 その3 量子ビットの状態は,球上の任意の点で表現され,振幅θと位相φで決まる.LED搭載のラズパイ・キットをPythonでプログラミングすれば,球上の量子ビットの動きを視覚化できる |
 |
お話 量子コンピュータ入門 その2 古典的な1ビットが“0”または“1”で表されるのに対し,量子ビットは“0”と“1”の両方の状態を同時に保持できる点で異なる.これを「重ね合わせ」と呼ぶ |
 |
お話 量子コンピュータ入門 その1 命令を順次処理する現代のコンピュータ(フォン・ノイマン型)に対し,量子コンピュータはキュービットの重ね合わせと絡み合いを活用して超並列的に計算を実行する |
 |
FreeRTOSで開発する高効率・高安定マルチタスク・マイコン・システム メモリやリソースが少ないマイコンに最適なFreeRTOS.その優先順位管理&停滞回避の鍵「プリエンプティブ・マルチタスク」とは |
 |
エッジAIを実現するモデル圧縮技術と開発事例 エッジAIはセンサの近くでAI処理を行う技術.クラウド・ベースのAIとは異なり,リアルタイム処理や高セキュリティ,コストダウンを実現できる |
 |
最新研究 Raspberry Pi 4のGPUプログラミング Raspberry Pi 4のSoCにはCPUとVideoCoreがある.グラフィック描画に使われる Raspberry PiのGPU“QPU”(Quad Procesing Unit)の性能や役割を解説する |
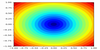 |
Pythonではじめる 数値解析入門 高性能な数値計算機能をもち,美しいグラフを描画できる有償のMATLABを使わず,フリーのPython用グラフ描画ライブラリ “Matplotlib”の使い方を解説する |
 |
故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 多次元のデータを低次元に落とし込む技術「主成分分析」(Principal Component Analysis:PCA)の基礎を解説する.ビッグ・データの解析やパターン認識に利用できる |
 |
LiDAR×ROSで作る地図作成ロボット 掃除,配膳,警備…人に代わって働く自律ロボットには“SLAM”と呼ぶ自己位置推定と地図作成の技術が利用されている.第1回は、自作のSLAMロボットのあらましを解説する |
VOD教材 [視聴無制限]
 |
[VOD/Pi5 KIT/data]大規模言語モデルLLMによる生成AIプログラミング入門 ラズパイに軽量実装!ネット接続不要のスタンドアロン・エッジ開発 |
 |
[VOD/KIT]Zynqで初めてのFPGA×Linux I/O搭載カスタムSoC製作 開発環境の設定からプロセッサと自作IPの統合,高位合成,Linux上のCPUアプリ開発まで |
|
[VOD]Zynqで初めてのFPGA×Linux I/O搭載カスタムSoC製作 実習キット付きVOD開発環境の設定からプロセッサと自作IPの統合,高位合成,Linux上のCPUアプリ開発まで |
 |
[VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門 AIを実装したエッジの作り方を1日で学ぶ |
 |
[VOD/KIT]Wi-Fiマイコン&ラズパイ付き! 初めてのiOS/Android×センサ・プログラミング 農園も工場も自宅から!計測値をサーバに転送してスマホでモニタ&制御 |
 |
[VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門 Linuxとラズベリー・パイを使った計測制御の基礎と操作方法を1日でマスタする |
 |
[VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門 Linuxとラズベリー・パイを使った計測制御の基礎と操作方法を1日でマスタする |
 |
[VOD/KIT]Python×実習キット×スマホでできる!ESP32マイコン活用術 定番IoTマイコン“ESP”とスマホの連携アプリをPythonで高速開発 |
 |
[VOD/KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方 OS/デバイス・ドライバの基礎からARM SoC“LTTP3”を使ったラズパイ互換ボードの開発まで |
|
[VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方 OS/デバイス・ドライバの基礎からARM SoC“LTTP3”を使ったラズパイ互換ボードの開発まで |