[著書付き]Pythonで一緒に!ロボット制御のモデルべース設計
【ロバスト制御編】
現実の制御対象とモデルの間のギャップを考慮した制御を学ぶ(講義334分/解説175頁)
- 著者・講師: 南 裕樹
- 企画編集・主催: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
- 関連記事:Pythonで一緒に!ロボット制御のモデルベース設計
- 関連製品:[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- 関連製品:[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【フィードバック制御編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【フィードバック制御編】
- 関連製品:[VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門
- 関連製品:[VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門
- 関連製品:[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門
- 関連製品:[VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門
ご購入
下記のボタンを押して,必要事項の入力をお願いいたします.
ご購入前にご理解いただきたいこと
- 本製品は,2023年12月14日に開催したウェビナを録画して編集した動画です.繰り返し再生,一時停止,巻き戻しが可能です.
- 本製品では,講義テキストとして「制御系設計論(コロナ社)」も使用します.本書籍をお持ちの場合は,[VOD]製品をご検討ください.
講義内容
制御工学は,モノの動きをデザインする科学です.
制御工学では,まず,モノ(システム)の動特性を調べます.そして,その特性を理解した上で,望ましい動きになるような制御器を設計します.「Pythonで一緒に!ロボット制御のモデルべース設計」シリーズでは,さまざまな設計手法の考え方と計算テクニックをPythonプログラミングを活用しながら解説します.
第3回のテーマは「ロバスト制御」です.モデルベース設計においては,制御対象の動特性を正確にモデル化できていることが前提となっていますが,一般に,特性や複雑なシステムを完璧にモデル化することは困難です.また,設計のしやすさの観点から,微小なむだ時間や非線形性などをあえてモデル化しないこともあります。そういった,制御対象とモデルの間のギャップである「不確かさ」に対応する制御がロバスト制御です.
本セミナでは,まず,システムのモデル表現と周波数特性を復習します.そして,制御対象の安定余裕を考慮したループ整形法を説明します.さらに,制御対象の不確かさをモデル集合として記述し,そのモデル集合に対して,制御器を設計する方法を紹介します.
|
|---|
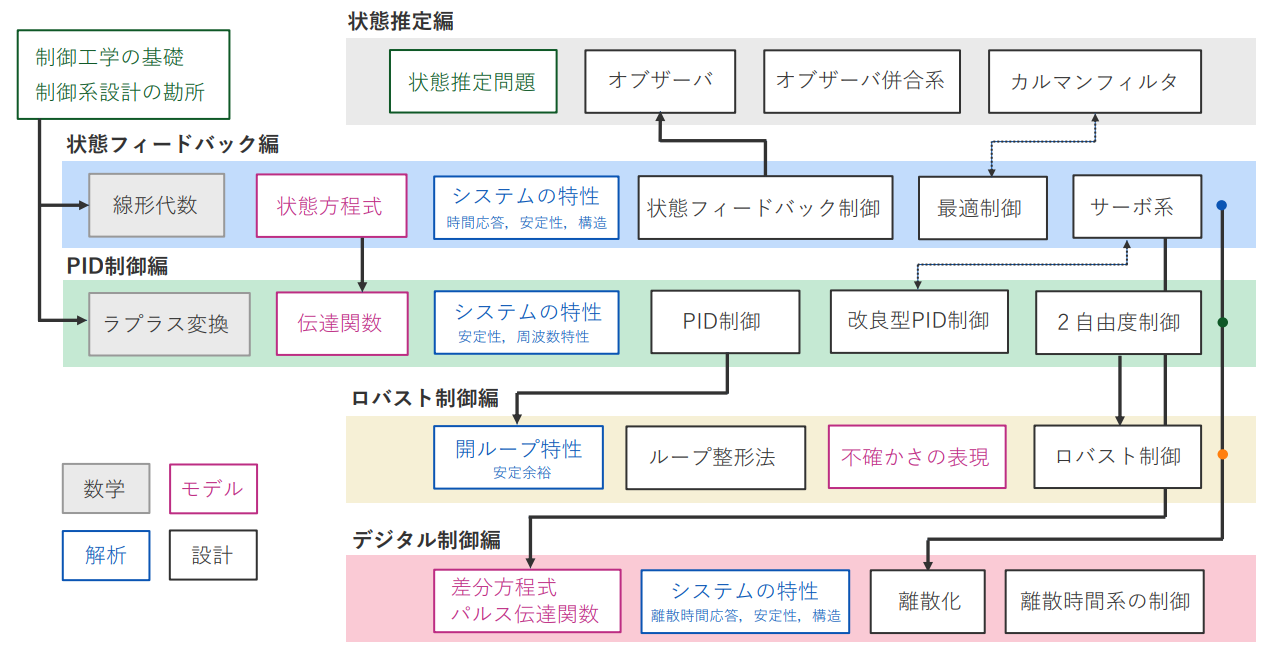
| 図1「Pythonで一緒に!ロボット制御のモデルべース設計」シリーズの学習内容 |
|
|---|
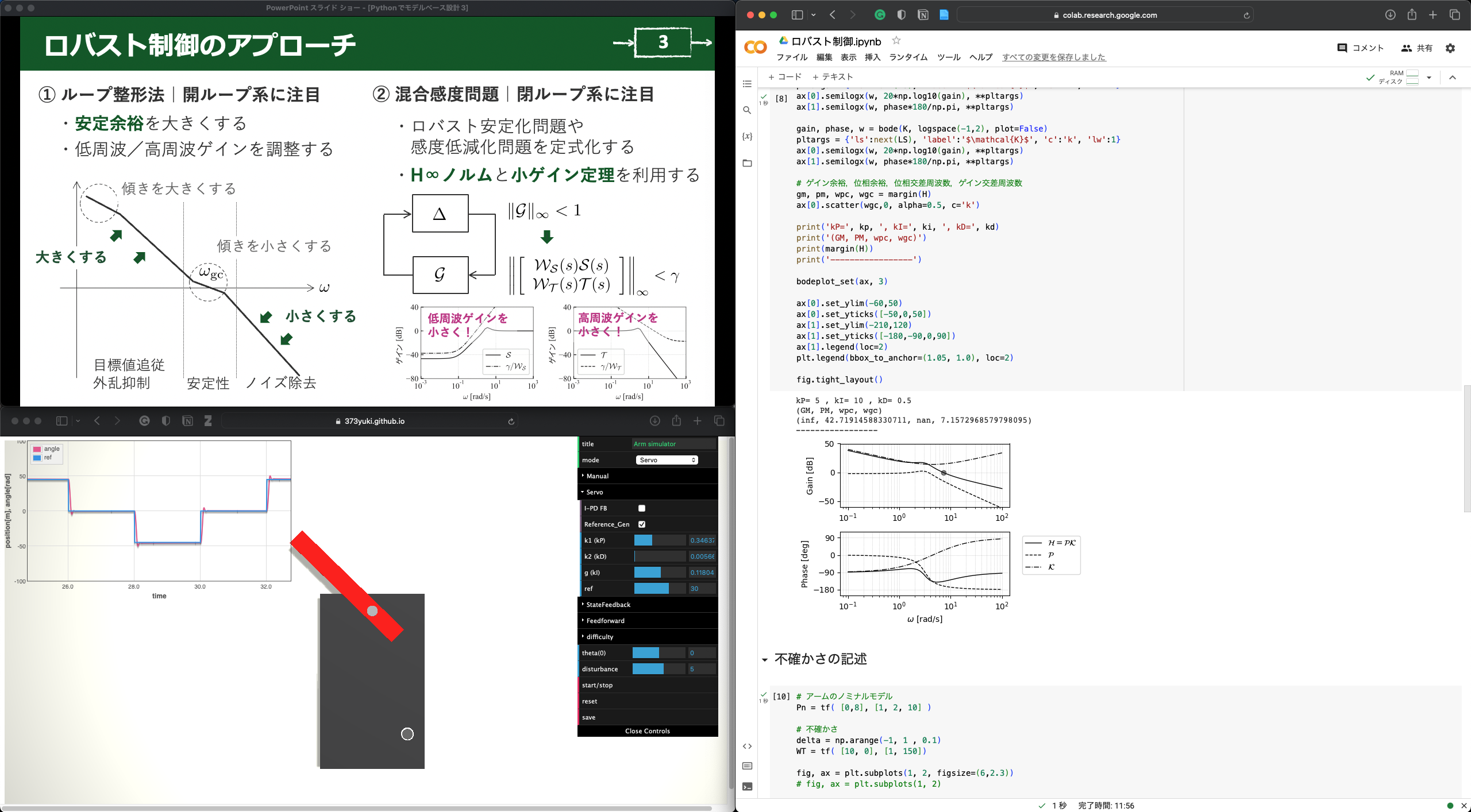
| 図2 本セミナでは,WEBブラウザ上でPythonを実行できるGoogle Colaboratoryや,アーム/倒立振子のシミュレータも動かしながら不確かさを考慮したロバスト制御を学ぶ |
アジェンダ
(1)制御系設計の流れと勘所
(2)動的システムの表現
- 常微分方程式によるモデリング
- 伝達関数
- 状態方程式
(3)動的システムの特性
- 周波数特性
- ナイキストの安定判別法
- 安定余裕
- 不確かさの記述
(4)ループ整形法
- 開ループ系の設計仕様
- PID制御
- 位相進み・遅れ補償
- Pythonでループ整形
(5)ロバスト制御
- H∞ノルムとスモール・ゲイン定理
- ロバスト安定化問題
- 混合感度問題
- Pythonでロバスト制御系設計
(6)アドバンスト制御
- 安定化補償器のパラメータ化
- 一般化制御対象とH∞制御問題
- 線形行列不等式を利用した解法
ショートセミナ
制御対象の不確かさ
混合感度問題: 不確かさのモデル化
受講対象
- 制御系設計の方法を知りたい方
- ロバスト制御の基礎を学びたい方
- Pythonで制御工学を体験したい方
あると望ましい予備知識
- 力学や電気回路の基礎(オームの法則を知っている)
- 複素関数の基礎(複素数の演算ができる)
- プログラミングの基礎(数行のコードを書いて実行したことがある)
- 制御工学の基礎(伝達関数や状態方程式を知っている,
または,【PID制御編】や【状態フィードバック制御編】を受講している)
講演の目標
- 制御系設計(動きのデザイン)の基本的な方法を説明できる
- 不確かさへの対処方法を説明できる
- 簡単なPythonプログラムを作成できる
受講者が事前に準備するもの
- 筆記用具と計算用紙(ノート)
- Pythonプログラム実行環境(Google Colabratoryなど)
今後のセミナ予定
- Pythonで初めてのモデルベース制御系設計【状態推定編】
- Pythonで初めてのモデルベース制御系設計【ディジタル制御編】
講師紹介
略歴
2009年3月京都大学大学院情報学研究科博士後期課程修了. 日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教, 奈良先端科学技術大学院大学助教,大阪大学講師などを経て, 2019年3月より大阪大学大学院工学研究科機械工学専攻准教授. 博士(情報学).一般社団法人みんなの制御塾代表理事.
主な著書
- 制御系設計論,コロナ社 (2021)
- やさしくわかるシーケンス制御,オーム社(2020)
- Pythonによる制御工学入門,オーム社 (2019)
- 倒立振子で学ぶ 制御工学,森北出版 (2017)
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術2020年9月号