
|
|---|
リアルタイムOS入門 タスクの生成と管理
マルチタスク・プログラミングの初めの一歩
System_Initialize()で生成して FreeRTOSでスケジューリング
|
|---|
|
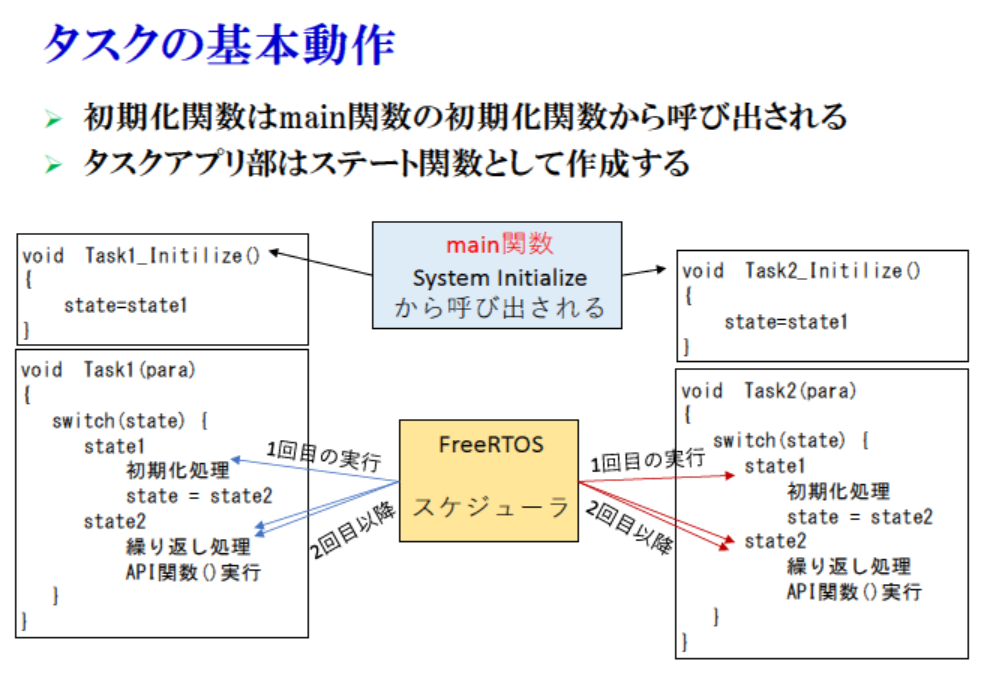
図1 タスクは,初期化部とアプリケーション部で構成され,ステートマシン形式で設計される,状態遷移を制御することで,初期化や繰り返し処理を効率よく実行できる.画像クリックで動画を見る.または記事を読む.[提供・著]後閑 哲也
詳細:[VOD/KIT/data]Wi-Fi×32bit PIC!FreeRTOSプログラミング実習 オールインキット |
リアルタイムOS入門 タスクの生成と管理
リアルタイムOS(RTOS)は,タスク管理を通じて効率的かつ柔軟なシステム制御を可能にします.中でも,FreeRTOSは広く使用されており,タスク生成からスケジューリング,制御までの一連のプロセスをサポートしています.
タスクの生成と基本構造
タスクは通常,初期化関数とアプリ関数部の2つで構成されます.次のような基本的な構造が一般的です.
- 初期化部
初期化関数は,タスクの状態を初期化し,`main()`関数内の`System_Initialize()`から呼び出されます.この関数では,タスクの状態変数が定義され,初期状態(例:`TASK_STATE_INIT`)に設定されます - アプリケーション部
タスクのアプリケーション部分は,ステートマシンの形式で作成されます.状態遷移(State Transition)を制御することで,タスクは異なる機能を順次実行します.次のような状態が典型的です- 初期化状態:一度だけ実行される処理
- 繰り返し処理状態:周期的な動作やイベント発生時の処理
タスク制御の基本API
FreeRTOSでは,タスク制御用にさまざまなAPIが提供されています.以下は代表的なものです.
- `vTaskSuspend()`:タスクを休止状態(サスペンド)にします
- `vTaskResume()`:サスペンド状態のタスクを再開します
- `vTaskDelay()`:指定されたTick数分タスクを遅延させます.周期的なタスク実行に便利です
LEDの点滅を制御する場合,`vTaskDelay()`を使用して一定間隔での点灯/消灯を実現できます.このようなAPIを適切に活用して,柔軟なタスク管理を行います.
タスクのスケジューリング
FreeRTOSのスケジューラは次の3つの方式をサポートします.
- 優先順位ベースのスケジューリング
タスクは優先順位に基づき実行されます.もっとも優先度の高いタスクが実行状態(Running)になります - プリエンプション(Preemption)
イベントや割り込みが発生すると,現在のタスクを中断し,優先順位の高いタスクを実行します - タイムシェアリング
一定の時間間隔で実行タスクを切り替えることで,複数タスクを公平に処理します.`vTaskStartScheduler()`を呼び出すとスケジューラが起動し,上記の方式でタスクを制御します.
タスクのステートマシン設計
タスクのステートマシンは,効率的なタスク制御を実現するための基本設計パターンです.
ステートマシンの基本概念
タスクのステートマシンは,状態(State)とその遷移(Transition)によって動作を管理します.各状態は明確な機能をもち,遷移条件を満たすと次の状態に移行します.次のような遷移が一般的です.
- 初期状態(Init)
一度だけ実行される処理 - サービス状態(Service Tasks)
主要なタスク処理 - エラー・ハンドリング状態(Error Handling)
エラー時の処理
ステートマシンのメリット
- コードの可読性と保守性の向上
各状態が独立したロジックをもつため,複雑な処理でも構造が明確になります - 柔軟な拡張性
新しい機能を追加する場合,新規状態を追加するだけで実現できます
実践での適用例
LED点滅タスクでは次のようなステートマシンが設計されます.
- 初期化状態:GPIOを設定
- 点灯状態:LEDを点灯し,遅延処理を実行
- 消灯状態:LEDを消灯し,次の点灯まで待機
ステートマシン設計は,リアルタイム性が求められる組み込みシステムだけでなく,幅広いアプリケーションで応用可能です.〈著:ZEPマガジン〉
著者紹介
- 1971年 東北大学 工学部卒 大手通信機メーカにて制御機器開発に従事
- 1996年 ホームページ「電子工作の実験室」を開設
- 2003年 有限会社マイクロチップ・デザインラボ設立 代表取締役 計測制御システムコンサルタント,書籍執筆 セミナ講師
- 2012年 神奈川工科大学 工学部 客員教授
著書
- [VOD/KIT/Book/data]ラズパイPico W×ChatGPT APIで学ぶ 会話型IoTエッジ開発,ZEPエンジニアリング株式会社.
- [VOD/KIT]PICマイコン オールイン1日学習キット ,ZEPエンジニアリング株式会社.
- [VOD/KIT]PICマイコン オールイン1日学習キット ,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- 電子工作のための PIC16F1ファミリ活用ガイドブック,技術評論社.
参考文献
- [VOD/KIT]STM32マイコン&Wi-Fiモジュールで学ぶ C/C++プログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]M5Stack Core2付き!ESP32で学ぶPython&Arduinoプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]STM32マイコン&Wi-Fiモジュールで学ぶ C/C++プログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]M5Stackで一緒に作ろう!IoTセンシング・エッジ×クラウド連携システム開発[改訂版],ZEPエンジニアリング株式会社.
- [VOD/KIT]実習キットでできる!ラズパイPicoでマイコン入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]LabVIEW×Arduino!初めてのパソコン計測&制御【改訂版】,ZEPエンジニアリング株式会社.