
|
|---|
コンピュータ対戦型Tic-Tac-Toeゲームを作成しよう
1万円 FPGAスタータキットで作る RISC-V CPU
[Webinar/KIT/data]新人技術者のためのRISC-V CPU設計 初めの一歩(5月31日~6月7日,2日コース)
RISC-Vで実装するシンプルAIゲーム
|
|---|
| 図1 Tic-Tac-Toeゲームは3×3のマスで行う二人零和有限確定完全情報ゲーム.すべての手がオープンに共有される構造で,アルゴリズムの実装と検証に非常に適する.画像クリックで動画を見る.または記事を読む.参考:[VOD/KIT] 実習キットで一緒に作る!オープンソースCPU RISC-V入門 |
「1万円 FPGAスタータキットで作る RISC-V CPU」の実例として紹介されているのが,コンピュータと対戦できるTic-Tac-Toeゲームです.これは3×3のマスで行う二人零和有限確定完全情報ゲームであり,すべての手がオープンに共有される構造のため,アルゴリズムの実装と検証に非常に適した題材です.
このプロジェクトでは,FPGA上のSapphire SoCに搭載されたRISC-Vプロセッサを活用し,UART経由でPC上のターミナルと通信しながら対戦を行います.人間プレイヤはキーボード入力を使い,RISC-V搭載のAIと対戦します.ゲームのロジックはMiniMax法を用いて構成されており,最適解を短時間で導き出せます.
3KB未満に収まる実用プログラム
このTic-Tac-Toeゲームは非常に省メモリに設計されており,プログラムの全体サイズは3KB未満です.これはRISC-Vの短縮命令による命令サイズの圧縮による恩恵です.また,Sapphire SoCのAPIを利用することで,ハードウェア仕様や周辺の詳細な理解が不要となり,学習のハードルが低くなっています.
本プロジェクトでは以下のような手順で開発を進めていきます.
- RISC-V IDEを起動してWorkspaceを指定
- 新規にEfinix Makefile Projectを作成
- プロジェクト名をXyloni_TicTacToeとし,BSPを指定
- UART制御用のライブラリをインクルード
- 盤面状態を表現するための配列変数boardを準備
- ターミナルに盤面を描画する関数を作成
UART通信とMiniMax法の融合
RISC-Vボードが担うのは,盤面の状態管理とAIによる手の決定です.人間側からの入力はUART通信を通じて送られ,RISC-VはMiniMax法で全探索を行って最善手を選択します.すべての盤面を評価するため,ゲームは原理的には引き分けに帰結します.小規模な盤面であれば,全探索でも十分にリアルタイムで動作可能です.
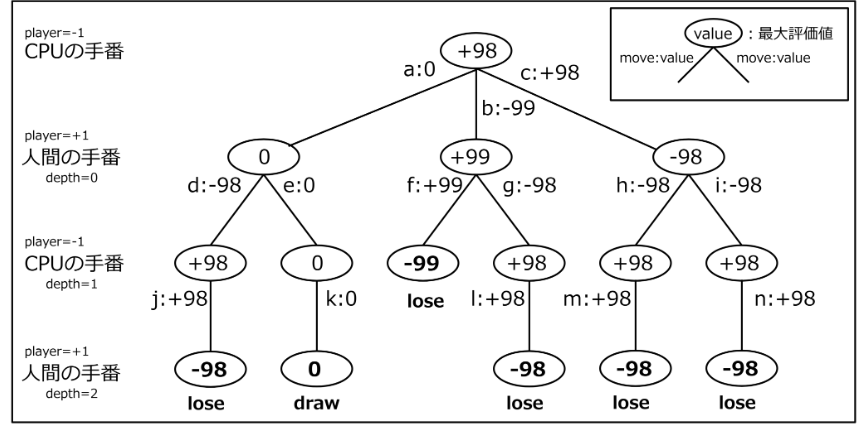
MiniMax法の基本
MiniMax法は,ゲーム理論における古典的な探索アルゴリズムです.Tic-Tac-Toeのような二人零和ゲームにおいて,相手がもっとも賢くプレイすることを前提に,自分の利益を最大化する手を選ぶ戦略です.これはゲーム木の全探索を行い,葉ノードでの評価値を親ノードへと逆伝播させていく手法です.
MiniMax法では,ゲームの状態をノード,可能な手を枝とする木構造を作成します.交互にプレイヤが動くため,奇数深度では最小化(相手の最善手を想定),偶数深度では最大化(自分の最善手を選択)になります.このようにして,ツリーのルートにおける最適な一手を選定することが可能です.
Tic-Tac-Toeでの応用
Tic-Tac-Toeは盤面が3×3のため,全探索してもノード数はそれほど多くありません.初期状態から最大でも$9!$とおりしかないため,メモリや演算性能に制約があるFPGA上のRISC-VプロセッサでもMiniMax法が現実的に実装可能です.
このアルゴリズムにより,RISC-V側のAIは常に最善の手を選びます.人間側がどんな手を打っても,引き分けにもち込むか負けるしかないという構造になります.
MiniMax法には評価関数が必要です.Tic-Tac-Toeでは最終局面での勝敗を数値化し,勝ちを+1,負けを-1,引き分けを0とすることで,全探索が可能になります.また,現在の状況で終了していない局面では,再帰的に次の状態を評価していきます.
MiniMax法の限界と発展
MiniMax法は簡潔で理解しやすい一方,ノード数が爆発的に増加するため,大規模ゲームには不向きです.将棋や囲碁のようなゲームでは,Alpha-Beta枝刈りなどの技術を組み合わせる必要があります.Tic-Tac-Toeのように状態空間が小さければ,MiniMax法は非常に強力です.
本プロジェクトでは,MiniMax法の実装が学習の核になります.AIやアルゴリズム設計の基礎を理解するよい機会です.
〈著:ZEPマガジン〉
著者紹介
- 出身地:京都市左京区
- 仕事:1986年,日立製作所に入社し,SHマイコンの開発に従事.以降,ルネサステクノロジ,ベンチャー企業,大手半導体メーカにて,画像処理用SoCや各種マイコンおよび関連半導体デバイスの開発を統括.現在もマイコン製品設計に取り組んでいる.
- 趣味:1978年からマイコン・FPGA・GPUと戯れ
- 執筆活動:2000年からマイコンを絡めた雑誌記事と書籍を執筆
著書
- [VOD/KIT]実習キットで一緒に作る!オープンソースCPU RISC-V入門,ZEPエンジニアリング株式会社.
- ARMベース・システムLSI開発の事例研究,Design Wave Magazine 2006年5月号,CQ出版社.
- ARM汎用プロセッサで使える汎用JTAGデバッガを自作する,Design Wave Magazine 2008年6月号,CQ出版社.
- 並列処理プロセッサxCORE徹底研究,インターフェース 2014年11月号~2015年6月号(連載),CQ出版社.
- Cで直叩き!超並列コンピュータGPU全速力,トランジスタ技術 2019年9月号(特集),CQ出版社.ほか
- 今すぐ使えるH8マイコン基板 初版2010年,増補版2011年,CQ出版社.
- 2枚入り小型ARMマイコン基板 2011年,CQ出版社.
- ARM PSoCで作るMyスペシャル・マイコン 基板付き 2013年,CQ出版社.
- ARM PSoCで作るMyスペシャル・マイコン 開発編 2013年,CQ出版社.
- SHマイコン活用記事全集 2014年,CQ出版社.
- FPGA電子工作スーパキット 2016年,CQ出版社.
- MAX10実験キットで学ぶFPGA&コンピュータ 2016年,CQ出版社.
- 完全版FPGA電子工作オールインワン・キット 2016年,CQ出版社.
参考文献
- Lチカ入門!ソフトウェア屋のためのHDL事はじめ,ZEPエンジニアリング株式会社.
- Zynqで作るカスタム・コンピュータ・チップ,ZEPエンジニアリング株式会社.
- [VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編&実践編】,ZEPエンジニアリング株式会社.
- [VOD/KIT]Xilinx製FPGAで始めるHDL回路設計入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]Zynqで初めてのFPGA×Linux I/O搭載カスタムSoC製作,ZEPエンジニアリング株式会社.
- [VOD]カメラ×ラズパイで一緒に!初めての画像処理プログラミング
- [VOD/KIT] 実習キットで一緒に作る!オープンソースCPU RISC-V入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ARM Cortex-A9&FPGA内蔵SoC Zynqで初体験!オリジナル・プロセッサ開発入門,ZEPエンジニアリング株式会社.