
|
|---|
ドローン制御工学入門 M5Stamp Flyの傾き角推定
加速度×角速度!センサフュージョン
カルマン・フィルタの軽量版「マドウイック・フィルタ」を採用
|
|---|
|
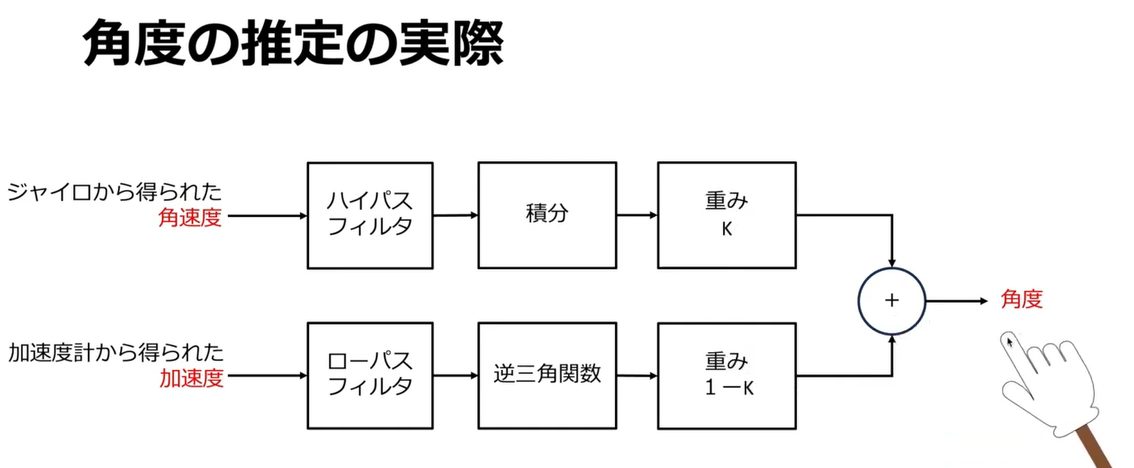
図1 角度推定は,振動や加速度変化の影響を受けやすくノイズが多い加速度センサと,ドリフトと呼ばれる誤差が蓄積しやすい角速度センサの2つのセンサから取得した情報を組み合わせて行う.鍵はマドウイック・フィルタ.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤 恒平. 詳細:[受講無料,簡単登録]LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100 セッション1 |
M5Stamp Flyの姿勢制御プログラミングと傾き角推定技術
ドローンの姿勢制御における角度推定の基礎
M5Stamp Flyは,小型ながらも高度な姿勢制御機能を備えたプログラムを構築できるデバイスです.その姿勢制御は,ドローンなどの安定飛行を支える技術の1つであり,角度推定が非常に重要な役割を果たします.
角度推定は,加速度センサと角速度センサの2つのセンサから取得した情報を組み合わせ,精度の高い姿勢データを算出することで行われます.このプロセスをセンサ・フュージョンと呼び,異なるデータを適切に組み合わせることで各センサの短所を補完します.
センサ・フュージョンとフィルタ処理の役割
角速度センサは,デバイスの回転速度を取得するために重要ですが,積分処理により角度を推定すると,ドリフトと呼ばれる誤差が蓄積しやすいという短所をもちます.加速度センサは,静的な角度(地球の重力方向)に基づく角度を求めるのに適していますが,振動や加速度変化の影響を受けやすく,ノイズが多いという欠点があります.
角速度センサのデータには高周波成分が多いことを考慮してロー・パス・フィルタ,加速度センサのデータにはハイ・パス・フィルタが適用され,それぞれのデータの周波数特性に応じて最適な信号成分を取り出すことができます.
マドウイック・フィルタによる効率的な角度推定
これらの異なるデータを統合する方法として,「マドウイック・フィルタ」がよく用いられます.このフィルタは,軽量であるため組み込みデバイスでも容易に実装でき,リアルタイムでの角度推定に適しています.
M5Stamp Flyのような小型デバイスでも,マドウイック・フィルタを利用することで,角度推定が安定し,正確な姿勢制御が可能になります.このフィルタは,ジャイロスコープと加速度センサから得られるデータを動的に重み付けし,信号の長所と短所を補完するために開発されたものです.
センサ・フュージョンとフィルタの重要性
センサ・フュージョンとは?
センサ・フュージョンは,異なる特性をもつセンサのデータを統合し,正確かつ安定したデータを得るための技術です.角速度センサのデータは,角度を積分することで直接得られますが,ドリフトの影響を受けて長時間の使用で誤差が蓄積します.これを「オフセット」と呼び,これが蓄積されると,姿勢制御が不安定になります.
加速度センサは重力に対する角度を測定しますが,ノイズが多く,外部の振動や加速変化に弱い性質があります.センサ・フュージョンは,これらのセンサから得られる信号に重みをもたせ,最適な割合で合成することで信号の精度を高めます.
マドウイック・フィルタとその利点
マドウイック・フィルタは,従来のエクステンデッド・カルマン・フィルタよりも計算量が少なく,小型デバイス向けに適した軽量なフィルタです.リアルタイムで計算が求められるドローンの姿勢制御においては,特にM5Stamp Flyのような低性能デバイスでも運用が可能です.〈著:ZEPマガジン〉
著者紹介
- ドローンやロボットの自作を通じて制御工学や関連技術の生涯勉強情報を提供
- 防衛大学大学校 航空宇宙工学教室,筑波大工学博士
- 陸自入隊,対戦車誘導弾などの装備品開発,国際高専教員,金沢工業大学教員
- ロボット・ランサ優勝,マイクロマウス・ニューテクノロジー賞受賞,指導者としてつくばチャレンジバンナム賞,飛行ロボコンマルチコプタ部門1位など
- 北海道函館出身,工学博士
著書
- つぶやき制御工学(YouTube)
- 理系的な戯れ(ブログ)
- こうへい(Kouhei Ito),Xに技術情報等をポスト