
|
|---|
u-blox F9Pを2個使い
0 4°精度GNSSコンパスの実験と製作
GNSSコンパスの原理と構成
|
|---|
|
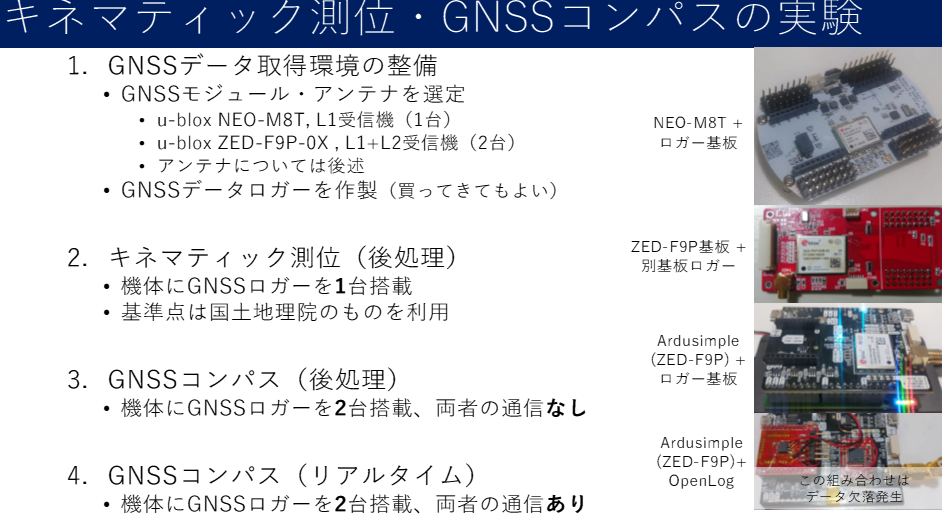
図1 u-blox ZED-F9Pを2台用いたGNSSコンパスは,高価なIMUを用いずに0.4°の高精度な方位取得が可能.正確なログ取得と適切な後処理を行えば,安定した相対位置情報が得られる.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSSコンパスは,2台の高精度GNSSモジュールを用いて,両者の相対位置から方位角を算出するシステムです.市販のu-blox ZED-F9Pモジュールを2台用いることで,0.4°程度の角度精度を実現できます.基準点を用意する従来のRTK測位と異なり,コンパス機能では相対位置だけで方位が得られるため,局所環境内での自律制御用途に適しています.
モジュール間の通信を行わない後処理型では,各GNSSロガーが独立にログを記録します.記録したバイナリ・データ(*.ubx形式)をRINEX形式に変換し,RTKLIBを用いて相対位置を算出します.リアルタイム型では,Ardusimpleなどを介して2台のZED-F9Pが通信し,直接ベース・ローバ間の差分データを処理します.この方式ではリアルタイムに方位角が得られるため,移動体ナビゲーションにも適用できます.
GNSS基板設計とアンテナの選定
GNSSの信号は1.2?1.6GHz帯のマイクロ波を用いるため,高周波信号に適した設計が必要です.インピーダンス整合や受動部品の特性を考慮し,基板設計ではグラウンド付きコプレーナ線路が一般的に用いられます.設計時の主な留意点は以下のとおりです.
- 基板厚,層構成,プリプレグの選定
- パターン幅とギャップ幅の計算
- 受動部品(R,L,C,TVS)の周波数特性の確認
- 部品配置とvia配置の最適化
アンテナ選定においては,搬送波対雑音比(C/N?)が40dBHz以上の性能が必要です.今回はu-blox ANN-MBとTOPGNSS AN306の2種を比較しました.前者は平坦で空力的に有利ですが重く,後者は軽量な反面,空気抵抗の影響を受けやすいという特徴があります.
後処理による高精度方位の算出
記録したGNSSログの後処理はRTKLIBを用いて行います.手順は以下のとおりです.
- RTKCONVにより*.ubxをRINEX形式に変換
- 国土地理院の電子基準点データを取得
- RTKPLOTで信号対雑音比を確認
- RTKPOSTでキネマティック解析
- 結果をRTKPLOTで可視化
この手順により,数センチ精度の相対位置が得られ,2台のアンテナ間のベクトルから高精度の方位が求まります.移動体やドローンの姿勢検出に応用可能です.
GNSS週切り替わりとは
GNSS時刻は,週番号(GNSS Week)と週内の経過秒数(Time of Week)で表されます.GNSS週の上限は10ビット(1024週)で,約19.6年ごとに0へリセットされます.この切り替わり時に,GNSSモジュールの動作が不安定になる場合があります.特にu-bloxの一部モジュールでは,週の切り替わり直前・直後に内部クロックのリセットやフラグの変化が見られ,データの不整合が発生します.
たとえばNEO-M8Tでは,604800秒(=7日)の直前にクロックがリセットされ,GNSS時刻が0秒から再スタートされます.この際,搬送波位相が飛んだり,追尾状態フラグが変化したりするため,精密なデータ処理には支障をきたします.
切り替わり時の影響と対策
GNSS週の切り替わりは,タイミング用途で使用されるモジュールにとって特に問題になります.GNSS受信機がリセットされたような挙動を示すため,継続的なデータ収集や時刻同期処理にエラーが発生します.搬送波位相を用いたRTK測位では,整合性の取れない値が記録されるため,解析結果の誤差が大きくなります.
この問題への対策としては,以下の手法が有効です.
- u-blox ZED-F9Pのような第9世代受信機を使用する
- 週切り替わり前後の数秒間のデータを無効とする
- 事前に境界時刻の影響を評価するテストを実施する
ZED-F9Pでは,GNSS週の切り替わりが発生しても搬送波位相や追尾状態に目立った乱れはありません.この特性から,高精度測位やキネマティック解析においてはZED-F9Pの使用が推奨されます.
週切り替わりを意識した設計
GNSSを用いた高精度測位システムでは,観測データの連続性と整合性が非常に重要です.特に長期間運用するシステムでは,週切り替わりの影響を予測し,設計段階で回避策を盛り込むことが求められます.これには,ファームウェアの更新だけでなく,ログ解析時のフィルタリングやフラグ管理も含まれます.
また,データ解析を行うRTKLIBなどのソフトウェアにおいても,週境界をまたぐデータ・セットに対しては,解析モードや衛星系の選択を柔軟に調整することが安定性向上につながります.
GNSS週切り替わりは,測位精度や信号の整合性に大きな影響を与える重要な要素です.特に精密なRTK測位を行う場合は,ハードウェア選定・運用タイミング・ソフト処理の三位一体で安定性を確保することが不可欠です.週切り替わり前後のテストと適切な機材選定が,長期運用の信頼性を左右します.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.