








GNSS測位方式のいろいろ
単独/相対/搬送波/スタティック/キネマティック
GNSS測位方式の種類と特徴
 |
|---|
|
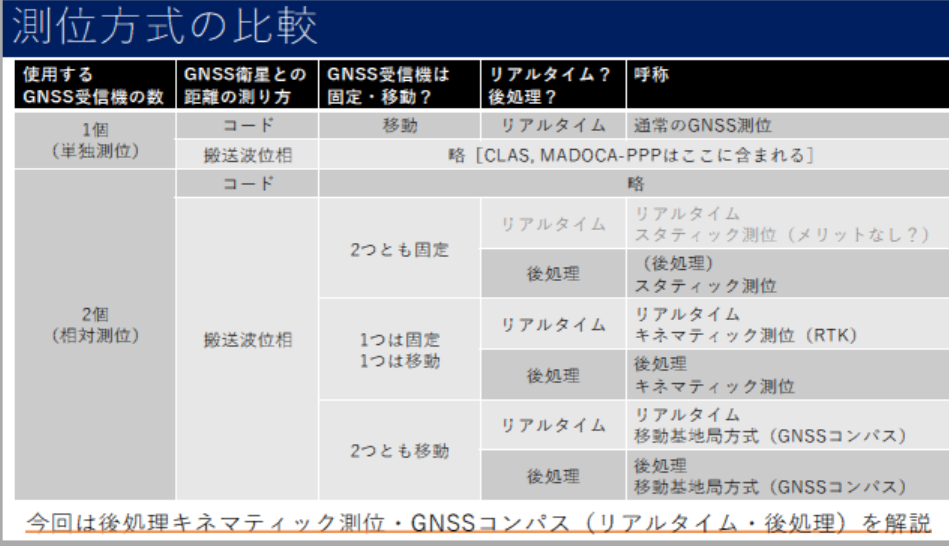
図1 GNSS測位の方式は,使用するGNSS受信機の数や,観測対象が固定か移動か,さらに処理方式がリアルタイムか後処理かによって分類される.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSS測位には複数の方式があり,用途や精度要求に応じて使いわけが行われています.基本的には,使用するGNSS受信機の数や,観測対象が固定か移動か,さらに処理方式がリアルタイムか後処理かによって分類されます.
もっとも一般的なものは「単独測位」で,これはスマートフォンやカーナビなどで使われている方式です.GNSS受信機1台と複数の衛星との距離を測ることで,リアルタイムに位置を求めます.使用される信号はコード(擬似距離)であり,構成がシンプルなため広く普及しています.
これに対して,「相対測位」はGNSS受信機を2台使用し,相互の距離を高精度に測定する方法です.観測信号には搬送波位相が使われ,cmレベルの測位が可能になります.
スタティック測位とキネマティック測位
相対測位の中でも,両方のGNSS受信機が固定された状態で行う手法が「スタティック測位」です.これは主に測量用途で使われ,観測データは記録された後,オフィスで後処理によって解析されます.
一方,1台が固定,もう1台が移動する場合は「キネマティック測位」と呼ばれます.リアルタイムで処理する方法はRTK(リアルタイム・キネマティック)測位,後から処理する方法は「後処理キネマティック測位」と分類されます.
RTKでは,基地局からの補正データを移動局が受け取ることで,数センチの精度での測位がリアルタイムに可能になります.高精度農業や建設機械の自動制御などに利用されています.
移動基地局方式(GNSSコンパス)
さらに発展的な手法として,「移動基地局方式」があります.これはGNSS受信機2台を移動体に取り付け,それぞれが動いている状態で相対的な方位角や位置を求める方法です.GNSSコンパスとも呼ばれ,基準局が固定されていない点が特徴です.
リアルタイムにも後処理にも対応しており,ドローンや自動車など,移動体どうしの精密な相対位置計測に有効です.搬送波位相を利用するため,測位精度は高く,姿勢推定にも応用できます.
測位方式の分類一覧
- 単独測位:受信機1台でコードを使用し,リアルタイムに測位
- スタティック測位:受信機2台が固定され,後処理で搬送波位相を解析
- RTK測位:受信機の一方が固定,もう一方が移動し,リアルタイムで補正処理
- 後処理キネマティック測位:RTKと同様の構成で後処理を行う方式
- 移動基地局方式:両方の受信機が移動し,GNSSコンパスによって相対位置や方位角を求める
搬送波位相とは
GNSSにおける搬送波位相は,電波の搬送波成分の波の位相を利用して距離を測定する技術です.コード測位よりもはるかに精度が高く,波長単位のずれを測ることで,cm単位の精度を実現します.搬送波の波長は非常に短く,おおよそ20cm以下です.
ただし,波の周期性のため整数波長の不確かさが生じることがあり,これを「整数アンビギュイティ」と呼びます.この問題を解消するためには,観測時間を延ばしたり,複数周波数を使ったりといった工夫が必要です.
搬送波位相はスタティック測位,RTK,GNSSコンパスなど,高精度測位を実現するための基盤技術です.地殻変動の観測やドローンの精密制御など,幅広い分野で活用されています.
まとめ
GNSS測位技術は,単独測位から高精度な相対測位まで多様です.搬送波位相を用いた技術は特に高精度が求められる分野で活躍しています.それぞれの方式の原理と特徴を正しく理解することで,目的に応じた適切な測位技術の選択が可能になります.
電離層とは何か
電離層とは,高度約60kmから800kmの範囲に存在する大気層で,太陽の紫外線やX線によって空気中の分子がイオン化され,自由電子が発生する領域です.電波はこの電子の存在によって屈折や反射を受けるため,通信や測位において重要な役割をもちます.
GPS信号もこの電離層を通過するため,電子密度の変化によって速度が低下します.特に,昼夜で電子密度が変化しやすく,太陽活動の影響も受けやすいため,遅延量が一定でないという問題があります.
電波伝搬への影響
電離層内の電子は,電波の進行方向を曲げる作用をもちます.これにより,電波は直線的には進まず,わずかに屈折しながら進みます.また,伝搬速度が低下することで,到達時間が延びます.この遅延を補正しないと,GPS測位に数m単位の誤差が生じる可能性があります.
電離層の補正方法
- 事前に作成された電離層モデルを用いて補正量を推定
- 2つの周波数をもつ2周波GNSSで,電離層の遅延を逆算
- 後処理ソフトウェアにより時間帯ごとの電子密度を加味して解析
これらの技術によって,電離層による誤差を抑えることが可能です.
まとめ
電離層はGPS測位にとってもっとも大きな外乱要因の1つです.電子密度の変動による遅延や屈折の影響を受けるため,常に補正処理が必要です.精度の高い測位を実現するためには,電離層の性質を理解し,適切な補正手法を選択することが欠かせません.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- “[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.