
|
|---|
INS vs GNSSの方位角測定精度
GNSSコンパスで真北を捉える
GNSSコンパスとINSによる方位角推定の比較
|
|---|
|
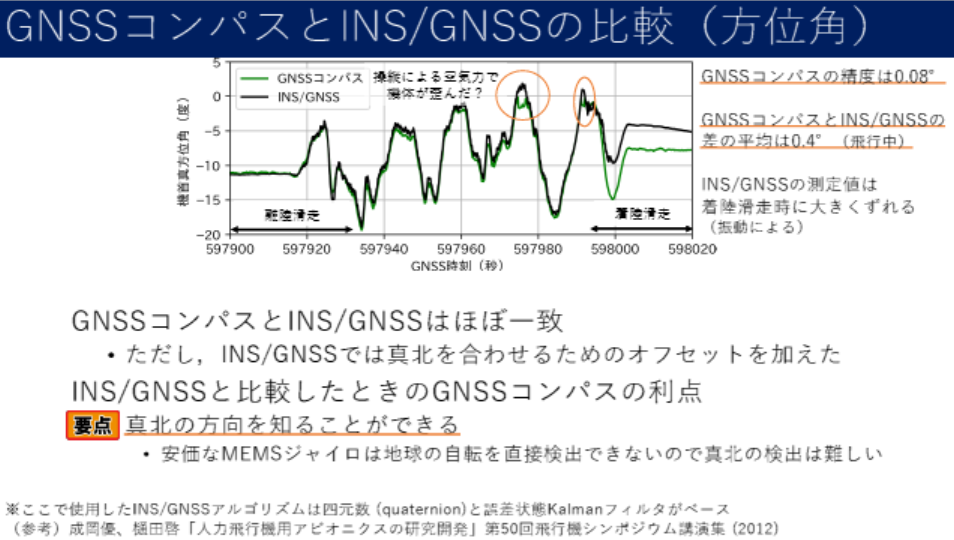
図1 GNSSコンパスは,INSと比較して同等の方位角精度をもちながら,真北基準の出力が可能.これは,GNSS由来の基線ベクトルに絶対的な意味があることを意味し,航法精度や地図基準の整合性を大きく向上させる.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSSコンパスは,2つのGNSSアンテナ間の基線ベクトルから,機体の方位角を高精度で推定するシステムです.対してINS(慣性航法装置)は,加速度センサやジャイロスコープから得たデータを基に姿勢を計算する方式です.実際の飛行において,これら2つの方式の方位角出力を比較する実験が行われました.
飛行中,両者の測定結果はおおむね一致しており,平均的な差は約0.4°です.標準偏差は0.08°と非常に小さく,GNSSコンパスの方位角出力の安定性と高精度が示されました.着陸滑走時にINSの出力にやや大きなずれが見られましたが,これは機体の振動による影響と考えられます.
GNSSコンパスの強み:真北の基準をもつ
INSによる方位角推定では,初期方向を真北に合わせるためのオフセット調整が必要です.これは,INS単体では地球の自転を直接観測できず,絶対的な方位の基準が得られないためです.特にMEMSジャイロでは精度の制約があり,真北の把握は困難です.
一方で,GNSSコンパスは衛星信号に基づいて方位角を算出するため,絶対的な北方向を直接捉えることができます.このため,オフセットの補正なしに真北基準の方位角を取得できます.これは,航法や制御アルゴリズムの設計上,大きな利点になります.
まとめ
GNSSコンパスは,INSと比較して同等の方位角精度をもちながら,真北基準の出力が可能です.これは,GNSS由来の基線ベクトルに絶対的な意味があることを意味し,航法精度や地図基準の整合性を大きく向上させます.
- GNSSコンパスは0.08°の標準偏差で方位角を出力できる
- INSでは真北の把握が困難なため,オフセット調整が必要
- GNSSコンパスは絶対的な真北の方位角を提供できる
GNSSコンパスとINSの比較は,方位角推定精度だけならず,地球基準での整合性や運用上の単純化にも影響を与えます.
GNSSコンパスが示す真北の意味
GNSSコンパスにおける最大の特徴は,絶対的な真北を基準とした方位角を直接得られる点です.従来のINS方式では,機体初期状態の向きを基準とするため,絶対的な北方向を捉えるには補正が必要です.GNSSコンパスは,地球上の複数衛星との位相差を利用し,2つのアンテナ間の基線ベクトルから方位を算出します.
この手法では,地球の回転や局所磁場の影響を受けることなく,安定した北方向を得ることが可能です.これにより,地理的な方向性に整合したデータが得られ,マッピングや地図座標系との統合が容易になります.
MEMS慣性センサとの構造的な違い
一般的なINSでは,MEMSジャイロを用いて回転角速度を測定します.しかしMEMSジャイロは,地球の自転速度である15°/hを高精度に観測することが難しく,時間とともに誤差が蓄積します.結果として,INS単体では真北の方向を判断することが困難になります.
GNSSコンパスは,測定値の初期補正を必要とせず,観測した衛星位置に基づく基線ベクトルを基準として,即座に真北方向を算出できます.この特性により,長時間の連続観測でもドリフトが発生しにくく,高精度な方位情報が維持されます.
まとめ
GNSSコンパスは,INSと異なり絶対的な北方向を測定可能であるという点で,航法機器として非常に有効です.方位精度の高さに加え,地理的基準との直接的な整合性を保つ機能が,飛行体やロボティクスへの応用において特に重要です.
- GNSSコンパスは真北を基準にした方位角を直接算出できる
- MEMSジャイロでは地球の自転を高精度に捉えることが難しい
- INSは補正を要するが,GNSSコンパスは補正不要で高精度を保てる
GNSSコンパスの真北基準出力は,INSと比較して地理座標との統合やデータ解釈において優位性をもちます.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.