
|
|---|
衛星測位の原理は三角測量
0.4°精度GNSSコンパスの実験と製作
三角測量に基づくGNSS測位の基本
|
|---|
|
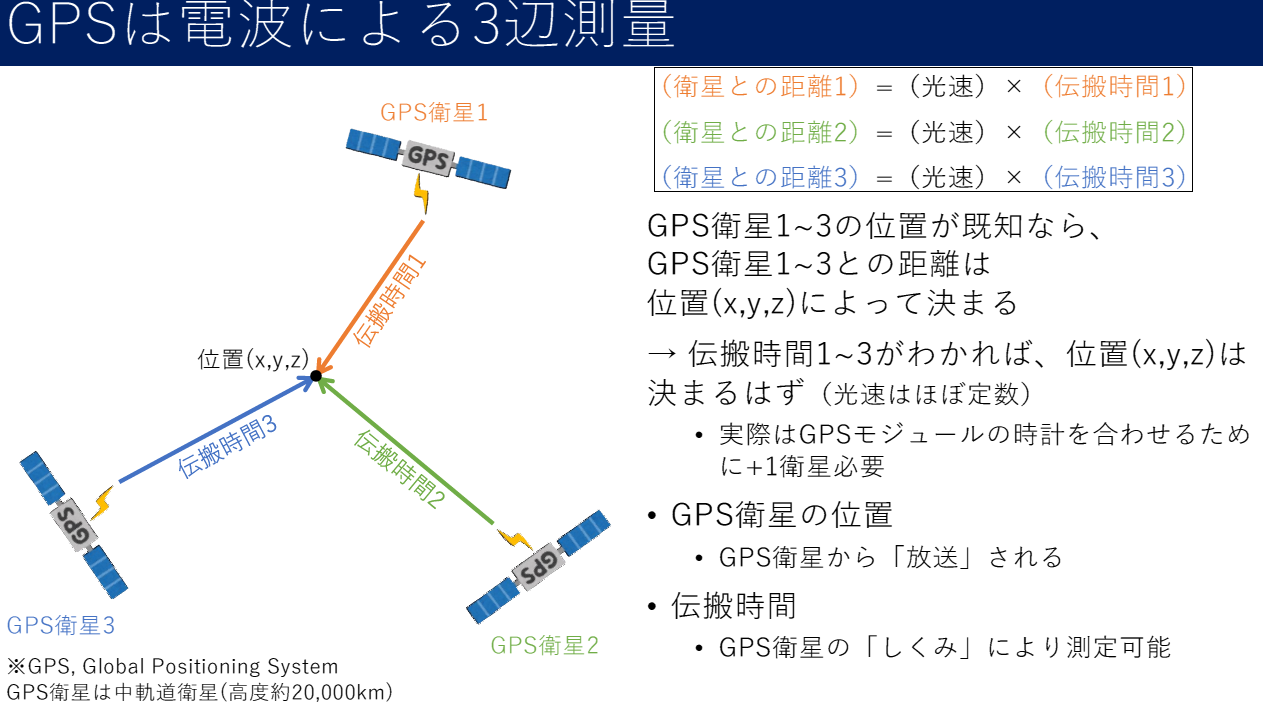
図1 GNSS測位は三角測量を基礎に,電波の伝搬時間や搬送波位相の解析により高精度な位置と方位を求める技術.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSSによる測位の基本は,空間に配置された複数の衛星との距離を測定し,現在地を三角測量により算出する手法です.衛星との距離は,衛星から送信される電波の伝搬時間と光速の積として求められます.具体的には,3つの衛星からの信号を受信し,それぞれの伝搬時間を用いて距離を求めることで,現在位置$(x, y, z)$を3次元的に決定するしくみです.
GPS衛星は高度約20000 kmの中軌道を周回しており,常時複数の衛星が地上と通信可能な状態にあります.ただし,受信機の内部時計は精度が限られているため,正確な時刻合わせのために4つ目の衛星による補正が必要です.このため,測位には最低4基の衛星が必要です.
搬送波位相による高精度測距
GNSS測位で用いられる基本的な手法であるコード測位は,擬似乱数(PRN)コードを利用して距離を求めます.しかしこの手法では,1チップあたり約300 mの精度にとどまり,数mの誤差が生じます.
より高精度な測距を実現するためには,搬送波の位相情報を利用する方法が有効です.搬送波位相測定は,波長の1/100の精度で距離を求めることができ,L1帯(1575.42 MHz)の場合はおよそミリm精度が可能です.
この方法では波の位相を測定しますが,波の周期が複数あるため,正確に何波分の距離があるかという整数値バイアスの決定が必要です.このバイアスが解決されたときに得られる解をFix解と呼びます.
GNSSコンパスによる方位の測定
GNSSコンパスとは,2つ以上のGNSSアンテナを使って,機器の方位を測定する技術です.この方法では,それぞれのアンテナで受信した同じ衛星からの信号の位相差を利用して,アンテナ間のベクトル方向を求めます.このベクトル方向がコンパスの指す方位になります.
たとえばアンテナ間距離を$L_r$とすると,位相差からその方向の変位量が計算され,方位角が高精度に求められます.GNSSコンパスは0.4°程度の角度精度をもち,地磁気センサでは困難な高精度方位測定が可能です.
このように,三角測量と電波の搬送波位相という基本原理の組み合わせにより,現代の高精度GNSS測位が成立しています.
搬送波位相測定とは
搬送波位相測定とは,GNSS衛星から送信される電波の位相情報を用いて,衛星との距離を高精度に求める技術です.搬送波とは,PRNコードが変調される元の高周波信号であり,その波の形そのものを解析対象とします.
この技術では,受信機で受信した信号と,内部で生成された基準信号との間の位相差を求めます.波長のわずか1/100程度の変化でも距離変化として検出できるため,理論的にはミリm単位の精度が可能です.L1帯の電波の波長は約19 cmです.
整数値バイアスの課題
ただし,搬送波位相を用いる際には「整数値バイアス」の問題が避けられません.これは,信号が何波分地球を伝わってきたかという「整数個の波数」が不明であるという課題です.これを正確に推定することを「整数値バイアスの解決」と呼びます.
このバイアスが正しく決まると,Fix解が得られます.逆に,推定に失敗した場合はFloat解となり,精度は落ちてデシm程度になります.このFix率は,GNSS受信環境や多周波対応状況に大きく依存します.
多周波によるバイアス解決の促進
搬送波位相測定においては,複数の周波数帯(L1, L2, L5など)を用いることで,整数値バイアスの解決が容易になります.これは,異なる周波数の差(ワイドレーン)を利用することで,波長の長い仮想的な信号を構成し,バイアスの影響を相対的に小さくできるためです.
- L1-L2の差周波(347.82 MHz)はワイドレーンに相当し,約86 cmの仮想波長を得る
- L2-L5の差周波(51.15 MHz)はエキストラ・ワイドレーンに相当し,約5.86 mの仮想波長を得る
このような多周波による補助情報の活用により,現代の高精度GNSS測位では搬送波位相を実用的に利用できる環境が整いつつあります.
搬送波位相測定は,PRNコードでは達成できない精度を実現する鍵となる技術です.位相差の検出と整数値バイアスの解決が技術的な肝であり,多周波GNSS受信機の登場により,cm精度での測位が日常的に可能となってきています.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.