
|
|---|
GNSSコンパスによる飛行機の姿勢角推定
0.4°精度GNSSコンパスの実験と製作
人力飛行機とGNSSコンパスは相性良し
|
|---|
|
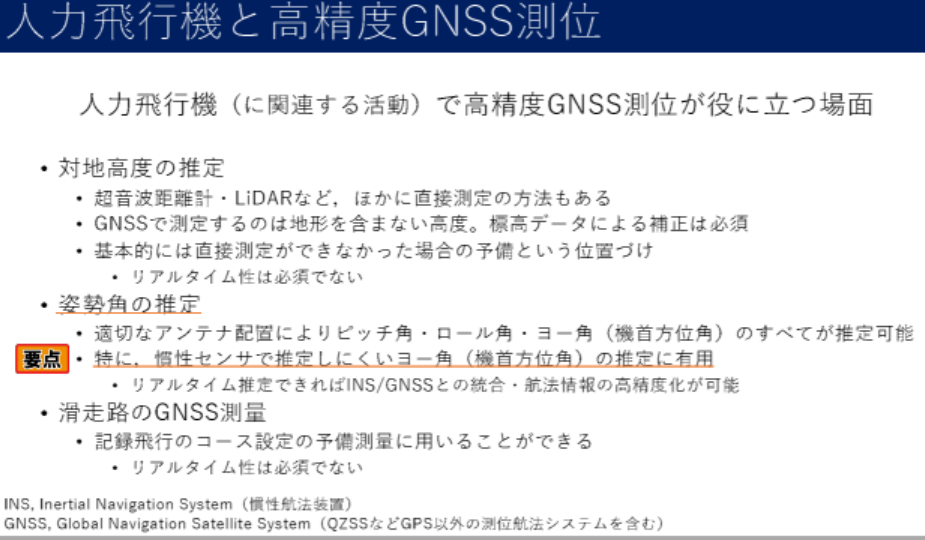
図1 ピッチ角,ロール角,ヨー角といった姿勢情報のうち,ヨー角は慣性センサでは精度確保が難しいため,GNSSによる推定が有効.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
人力飛行機における高精度な飛行データ取得には,GNSSコンパスが重要な役割を果たします.GNSSコンパスとは,複数のアンテナを用いて機体の姿勢角を推定する技術です.ピッチ角,ロール角,ヨー角といった姿勢情報のうち,ヨー角は慣性センサでは精度確保が難しいため,GNSSによる推定が極めて有効です.
人力飛行機とGNSSの相性
人力飛行機の特徴は,速度が低く,激しい機動を行わないことです.このため,GNSS信号の受信環境が安定しており,高精度な測位が可能です.さらに,機体に複数のアンテナを取り付けるスペースが確保でき,距離も十分に取れるため,GNSSコンパスによる姿勢推定に適した条件が整っています.
人力飛行機の特徴をまとめると,次のようになります.
- 機体サイズが大きくアンテナ間距離が十分に確保できる
- 周囲に高い建物がないためGNSS信号が遮られない
- アンテナは常に天頂を向くため指向性アンテナに適している
一方,軽量化や空気抵抗低減を重視するため,高性能アンテナの搭載が難しいという制約も存在します.また,機体剛性が低く,飛行中にアンテナ間距離が微妙に変動する可能性もあります.
実験と製作のポイント
GNSSコンパス・システムの実験では,2台のGNSSモジュールを使用しました.搭載モジュールは,u-blox社のZED-F9P-0X(L1+L2受信)を2台,NEO-M8T(L1受信)を1台選定しました.基準点には国土地理院のデータを活用し,後処理型のキネマティック測位を実施しています.
リアルタイムでの姿勢推定を行う場合,2台のGNSSロガー間の通信が必要です.ZED-F9PモジュールにOpenLogを組み合わせた環境では,データ欠落が発生することも確認されています.このため,安定したデータ取得のためにはハードウェア選定と接続方式に注意が必要です.
最終的なデータはKMLファイルにまとめられ,Google Earth上で人力飛行機の3Dモデルを用いた飛行可視化に成功しています.これにより,緯度,経度,高度,ピッチ,ロール,ヨーの各情報を正確に再現できるようになりました.
まとめ
GNSSコンパスは,人力飛行機の姿勢角推定に極めて有効です.特に,ヨー角推定の精度向上に大きく貢献します.人力飛行機の特性とGNSSの特性を組み合わせることで,安定かつ高精度な飛行データ取得が可能になります.
GNSSコンパスとは
GNSSコンパスとは,複数のGNSSアンテナを利用して,対象物の向きや姿勢角を推定するシステムです.通常のGNSS受信では位置情報しか取得できませんが,アンテナ間のベースラインベクトルを高精度に測定することで,ピッチ角,ロール角,ヨー角といった姿勢角情報も得られます.
GNSSコンパスのしくみ
GNSSコンパスは,アンテナ間の搬送波位相差を解析することで,正確な角度を算出します.たとえば,アンテナAとアンテナBがあるとき,それぞれが受信する搬送波の位相に微小な差が生じます.この位相差からベースラインベクトルを求め,そこから姿勢角を計算します.搬送波位相は非常に短い波長(L1帯で約19cm)をもつため,ミリmオーダの高精度が実現可能です.
GNSSコンパスの特徴をまとめると,次のようになります.
- 外乱に強く,慣性センサに比べドリフトが発生しにくい
- リアルタイム測位と組み合わせることで即時に姿勢情報を得られる
- 高精度な搬送波位相測定により小型機でも有効に動作する
適用上の注意点
GNSSコンパスを使用する際にはいくつかの注意点があります.まず,アンテナ間距離はある程度確保する必要があります.一般に,アンテナ間距離が大きいほど角度分解能が高まりますが,機体サイズとのバランスも考慮する必要があります.また,飛行中に機体がたわむと,アンテナ間距離が変化し,推定誤差の原因になります.
さらに,GNSSコンパスは見通しのよい環境でなければ高精度を維持できません.都市部や森林地帯など,GNSS信号が遮られる環境では精度が著しく低下することがあります.このため,人力飛行機のように広い空域で飛行するアプリケーションに非常に適しています.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.