SLAMロボット&ラズパイ付き!ROSプログラミング超入門
ROSの基本操作からノード間通信,センサ計測/モータ制御,LiDAR情報の取得,地図作成まで!自己位置推定技術を1日体験(講義319分/144頁)
- 著者・講師:砂川 寛行
- 企画編集・主催: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
ご購入
下記のボタンを押して,必要事項の入力をお願いいたします.
ご購入前にご理解いただきたいこと
- [VOD/KIT]には,後述の実習キットの(4)と(5)が付属されていません.Raspberry Pi4/Pi400をお持ちの場合は,本セミナの購入をご検討ください.
- 本セミナは,2022年4月16日に開催したウェビナを録画して編集した動画です.繰り返し再生,一時停止,巻き戻しが可能です.
本VODに付属の実習キット(はんだ付け不要)
(1)LiDAR搭載ロボット完成品
- 360°レーザ・スキャナ YDLIDAR X2(専用USB変換基板&USB Type-Cケーブル付き)
- ESP32,モータ・ドライバ,6軸センサ,エンコーダ搭載基板
- ロボット本体&筐体
- モバイル・バッテリ
- ラズパイ接続&ロボット電源用USB Micro Bケーブル 2本
(2)Wi-Fiルータ&電源アダプタWi-Fiルータ TL-WR802N(LANケーブル&USBケーブル付き)&電源アダプタ
(3)ROSセットアップ済マイクロSDカード
(4)Raspberry Pi400(日本語キーボード)
(5)Paspberry Piモニタ用HDMIケーブル&電源アダプタ

|
|---|
| 写真1 ご自宅にお届けするROSプログラミング実習キット |
講義内容
あらまし
本セミナは,LiDAR搭載ロボット完成品と実習環境セットアップ済みラズベリー・パイを動かしながら,ROSの基本操作からプログラミング技術,リアルタイム地図作成まで,SLAM(Simultaneous Localization and Mapping)の基本技術を体験できます.
ROS(Robot Operating System)は,ロボットを開発するためのソフトウェア・プラットフォームです.ロボットのアプリケーションを作るときに一からソフトウェアを開発するには時間と手間がかかります.本プラットフォームには,アプリケーション開発を支援するためのライブラリ,ツール,通信システム,ドライバなどが提供されているので,ロボットの開発期間を短縮できます.本プラットフォームを活用すると,複数のコンピュータによる分散制御や,自己位置推定と地図作成を同時に行うSLAMを行うことも可能です.本セミナは,LiDAR搭載ロボットやラズベリー・パイを使いながら,ROSの操作や,自動運転車や自律移動ロボットで利用されるSLAMの基本技術を一通り体験できるコースとなっています.

|
|
|---|---|
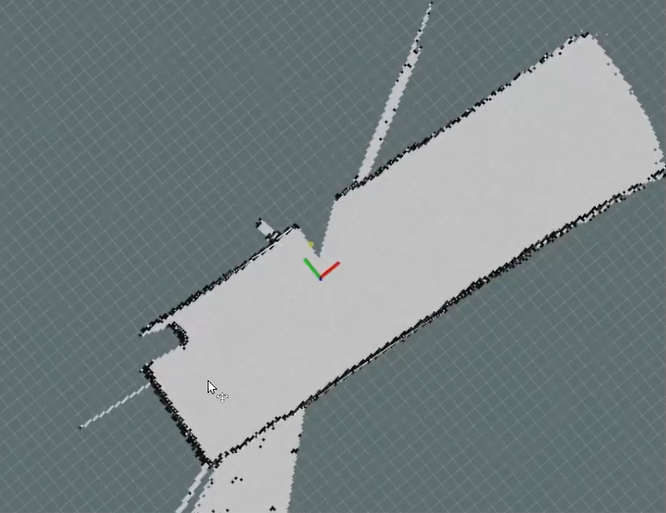
| 写真2 本セミナで使用するLiDAR搭載ロボット完成品 | 図1 ラズベリー・パイ4で実行したgmappingで地図を生成したところ |
アジェンダ
(1)セミナの概要
(2)ROSのしくみを理解する
- ノード,トピック,メッセージ,ROSマスターなどの用語解説
(3)ラズベリー・パイでROSを動かしてみる
- ロボット・シミュレータturtlesimでROS制御を体験
(4)マイコン開発環境のセットアップ
- フルカラーLEDや6軸センサのライブラリ・インストール
(5)実習で使っているロボットの解説
- ハードウェア構成,ROS&ArduinoIDEプログラミング
(6)LiDARを動かしてみる
- LiDARで取得したデータの確認
- ArduinoでLIDARデータの受信プログラミング
(7)ROSSerialのセットアップ
- マイコンをROS対応にするための準備
(8)LiDAR搭載ロボットを動かしてみる
- センサ・データ出力とモータ制御のプログラミング
- ロボットを制御するPC側のプログラミング
(9)SLAM体験
- ロボットの位置をRVizに表示
- gmappingを動かしてみる
- SLAMロボットでリアルタイムに地図を作成する
ショートセミナ
ロボットの位置や姿勢情報を表示する
RVizでロボットの傾きや部屋の形状をみてみる
launchファイルを実行してRVizで地図生成
受講対象
- ラズベリー・パイやArduinoを使って電子工作をしたことはあるが,ROSを始められなかった方
- ROSを使ってみたが,モノを動かす前に挫折した方
- ROSを体験してみたい方
- 安価にROSを使ったロボットを作ってみたい方
講演の目標
- ROSの基本操作がマスタできる
- ROSを使ったロボットの概要が理解できる
- 自分で教材のロボットを改造したり,応用したりできるようになる
あると望ましい予備知識
- ラズベリー・パイをセットアップできる程度のLinuxの基礎知識
- PythonによるLチカ・プログラミング経験
- ArduinoによるLチカ・プログラミング経験
実習に必要なソフトウェア&周辺機器
- HDMI対応のモニタ
- ラズベリー・パイに接続するマウス
- LiDAR動作確認用プログラム.次のWebページで[Triangulation]→[YDLIDAR X2]→[TOOL]を選択して,LidarViewer_V0.3.5.zipをダウンロード後,任意のフォルダにLidarViewer_V0.3.5.exeを保存してください.
https://www.ydlidar.com/service_support.html
※スタンドアロンではなく,ご自身のパソコンでラズベリー・パイを操作したい場合は,VNC Viewerなどが必要です.
無線LANに対応しており,次のVNCアプリケーションが動作することを確認してください.
https://www.realvnc.com/en/connect/download/viewer/
講師紹介
略歴
1994年 事務機器メーカ入社.事務機器のエレクトロニクス関連の開発設計に従事
主な著書
- 5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 付録Xホビー・スパコンで科学の実験 プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 全実験室に!高IQアルディーノ基板(記事および付録基板設計),トランジスタ技術2017年2月号,CQ出版社.
- トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.